
- Forums
- Product Forums
- General Purpose MicrocontrollersGeneral Purpose Microcontrollers
- i.MX Forumsi.MX Forums
- QorIQ Processing PlatformsQorIQ Processing Platforms
- Identification and SecurityIdentification and Security
- Power ManagementPower Management
- Wireless ConnectivityWireless Connectivity
- RFID / NFCRFID / NFC
- Advanced AnalogAdvanced Analog
- MCX Microcontrollers
- S32G
- S32K
- S32V
- MPC5xxx
- Other NXP Products
- S12 / MagniV Microcontrollers
- Powertrain and Electrification Analog Drivers
- Sensors
- Vybrid Processors
- Digital Signal Controllers
- 8-bit Microcontrollers
- ColdFire/68K Microcontrollers and Processors
- PowerQUICC Processors
- OSBDM and TBDML
- S32M
- S32Z/E
-
- Solution Forums
- Software Forums
- MCUXpresso Software and ToolsMCUXpresso Software and Tools
- CodeWarriorCodeWarrior
- MQX Software SolutionsMQX Software Solutions
- Model-Based Design Toolbox (MBDT)Model-Based Design Toolbox (MBDT)
- FreeMASTER
- eIQ Machine Learning Software
- Embedded Software and Tools Clinic
- S32 SDK
- S32 Design Studio
- GUI Guider
- Zephyr Project
- Voice Technology
- Application Software Packs
- Secure Provisioning SDK (SPSDK)
- Processor Expert Software
- Generative AI & LLMs
-
- Topics
- Mobile Robotics - Drones and RoversMobile Robotics - Drones and Rovers
- NXP Training ContentNXP Training Content
- University ProgramsUniversity Programs
- Rapid IoT
- NXP Designs
- SafeAssure-Community
- OSS Security & Maintenance
- Using Our Community
-
- Cloud Lab Forums
-
- Knowledge Bases
- ARM Microcontrollers
- i.MX Processors
- Identification and Security
- Model-Based Design Toolbox (MBDT)
- QorIQ Processing Platforms
- S32 Automotive Processing Platform
- Wireless Connectivity
- CodeWarrior
- MCUXpresso Suite of Software and Tools
- MQX Software Solutions
- RFID / NFC
- Advanced Analog
-
- NXP Tech Blogs
S32K396 Transmit and receive multiple CAN messages (polling)
Hi @PetrS ,
I have successfully transmitted multiple messages on CAN bus.
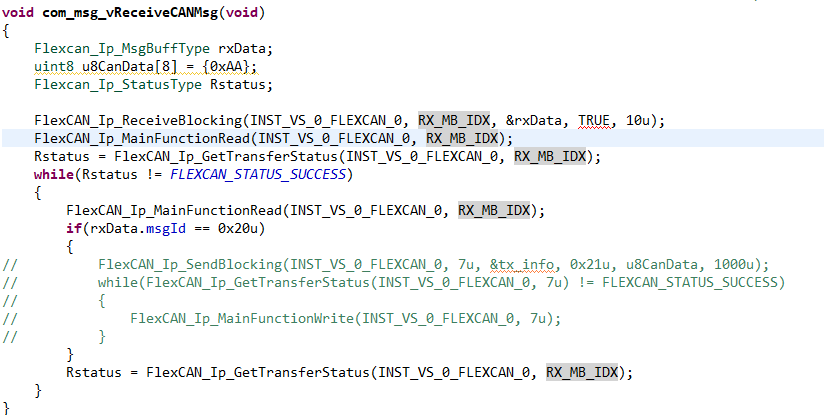
I am still stuck in situation for receiving CAN messages. Please see the attached screenshots, Even if I am not sending any message still "RStatus" is "FLEXCAN_STATUS_SUCCESS", and when I am sending message from PCAN then also the "RStatus" is "FLEXCAN_STATUS_SUCCESS".
The msgID shows some garbage value.
Hi,
if want to use polling mode then have below code for each reception. This would be
- start receiving, i.e. call FlexCAN_Ip_Receive
- check status using FlexCAN_Ip_GetTransferStatus and call FlexCAN_Ip_MainFunctionRead repeatedly to process received message in given MB.
FlexCAN_Ip_Receive(INST_FLEXCAN_0, RX_MB_IDX, &rxData, TRUE);
while(FlexCAN_Ip_GetTransferStatus(INST_FLEXCAN_0, RX_MB_IDX) !=FLEXCAN_STATUS_SUCCESS)
{ FlexCAN_Ip_MainFunctionRead(INST_FLEXCAN_0, RX_MB_IDX); }
...process received data in user buffer here
BR, Petr
Hi @PetrS ,
I tried this but FlexCAN_Ip_GetTransferStatus(INST_VS_0_FLEXCAN_0, RX_MB_IDX) returns "FLEXCAN_STATUS_SUCCESS" every time.
When I debugged the code I found that the below base->IFLAG1 is setting to 0 and hence causing the skipping of while loop.

{kind=link}
{kind=link}
Can you please help me to know from where is this getting set to 0, I tried debugging but didn't find the exact loophole?
Hi,
you can refer to below example which shows multiple MBs usage with interrupt/callbacks too.
https://community.nxp.com/t5/S32K-Knowledge-Base/Example-S32K344-FlexCAN-Ip-TX-RX-EnhanceRXFIFO-test...
It is for S32K344, but it is similar.
BR, Petr
Hi,
did not get a point much.
On the bus there is always just single message at the time, the one sent from a node which won bus arbitration. If node/MCU is receiving this message, it will be stored in MB/RXFIFO if MB/RXFIFO was configured to receive this message. Meanwhile a node can have prepared other MBs for message transmissions and those will be transmitted once selected by internal arbitration process and after first opportunity window on the bus.
BR, Petr