
- Forums
- Product Forums
- General Purpose MicrocontrollersGeneral Purpose Microcontrollers
- i.MX Forumsi.MX Forums
- QorIQ Processing PlatformsQorIQ Processing Platforms
- Identification and SecurityIdentification and Security
- Power ManagementPower Management
- Wireless ConnectivityWireless Connectivity
- RFID / NFCRFID / NFC
- Advanced AnalogAdvanced Analog
- Neural Processing UnitsNeural Processing Units
- MCX Microcontrollers
- S32G
- S32K
- S32V
- MPC5xxx
- Other NXP Products
- S12 / MagniV Microcontrollers
- Powertrain and Electrification Analog Drivers
- Sensors
- Vybrid Processors
- Digital Signal Controllers
- 8-bit Microcontrollers
- ColdFire/68K Microcontrollers and Processors
- PowerQUICC Processors
- OSBDM and TBDML
- S32M
- S32Z/E
-
- Solution Forums
- Software Forums
- MCUXpresso Software and ToolsMCUXpresso Software and Tools
- CodeWarriorCodeWarrior
- MQX Software SolutionsMQX Software Solutions
- Model-Based Design Toolbox (MBDT)Model-Based Design Toolbox (MBDT)
- FreeMASTER
- eIQ Machine Learning Software
- Embedded Software and Tools Clinic
- S32 SDK
- S32 Design Studio
- GUI Guider
- Zephyr Project
- Voice Technology
- Application Software Packs
- Secure Provisioning SDK (SPSDK)
- Processor Expert Software
- Generative AI & LLMs
-
- Topics
- Mobile Robotics - Drones and RoversMobile Robotics - Drones and Rovers
- NXP Training ContentNXP Training Content
- University ProgramsUniversity Programs
- Rapid IoT
- NXP Designs
- SafeAssure-Community
- OSS Security & Maintenance
- Using Our Community
-
- Cloud Lab Forums
-
- Knowledge Bases
- ARM Microcontrollers
- i.MX Processors
- Identification and Security
- Model-Based Design Toolbox (MBDT)
- QorIQ Processing Platforms
- S32 Automotive Processing Platform
- Wireless Connectivity
- CodeWarrior
- MCUXpresso Suite of Software and Tools
- MQX Software Solutions
- RFID / NFC
- Advanced Analog
- Neural Processing Units
-
- NXP Tech Blogs
- RSS フィードを購読する
- トピックを新着としてマーク
- トピックを既読としてマーク
- このトピックを現在のユーザーにフロートします
- ブックマーク
- 購読
- ミュート
- 印刷用ページ
Microcontroller S32K118 I2C protocol register configuration
- 新着としてマーク
- ブックマーク
- 購読
- ミュート
- RSS フィードを購読する
- ハイライト
- 印刷
- 不適切なコンテンツを報告
Hi friends, is a pleasure to be here. I am working with the protocol I2C using the microcontroller S32K118. I am working with a device calls KTS1622EUAA-TR that is a extenser of inputs and outputs. The good news that I2c fuction of the program lpi2c_master_s32k118 it is working because it reconigzed the device to write and read, but I want to work the registers of the device so the problem that I have here which the fuction that I can write to the registers of the device, the fuctions for it are this:
status_t LPI2C_DRV_MasterSendData(uint32_t instance,
const uint8_t * txBuff,
uint32_t txSize,
bool sendStop)
status_t LPI2C_DRV_MasterSendDataBlocking(uint32_t instance,
const uint8_t * txBuff,
uint32_t txSize,
bool sendStop,
uint32_t timeout)
Another thing that I want to use for this is to read the state of the inputs and outputs of the device
status_t LPI2C_DRV_MasterReceiveData(uint32_t instance,
uint8_t * rxBuff,
uint32_t rxSize,
bool sendStop)
status_t LPI2C_DRV_MasterReceiveDataBlocking(uint32_t instance,
uint8_t * rxBuff,
uint32_t rxSize,
bool sendStop,
uint32_t timeout)
please let me know about it,
- 新着としてマーク
- ブックマーク
- 購読
- ミュート
- RSS フィードを購読する
- ハイライト
- 印刷
- 不適切なコンテンツを報告
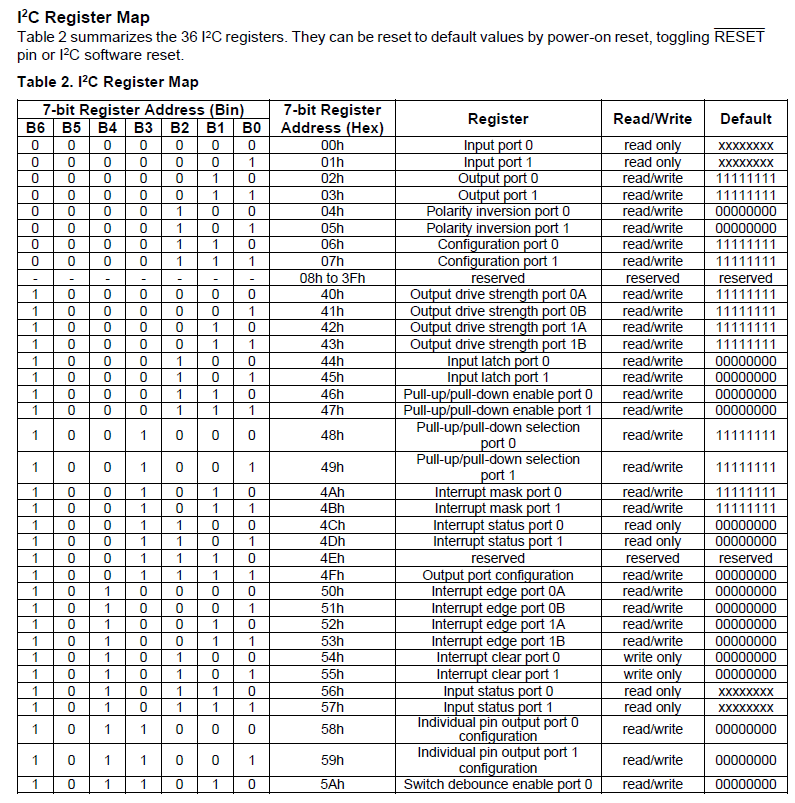
ok for example if I want to write in int the register 0x06 to configurate all the pins of the port0 as input or output, how it will be using the function LPI2C_DRV_MasterSendDataBlocking(uint32_t instance, const uint8_t * txBuff, uint32_t txSize, bool sendStop, uint32_t timeout)?
It will something like this, because I am not sure to send the information to the device
/* Definition of the data transfer size */
#define TRANSFER_SIZE (3u)
uint8_t buffer3[TRANSFER_SIZE]={0x05,0xFF};
LPI2C_DRV_MasterSendDataBlocking(INST_LPI2C1,buffer3,TRANSFER_SIZE, true, OSIF_WAIT_FOREVER);
Please let me know friends
Best Regards,
Rony Vargas
- 新着としてマーク
- ブックマーク
- 購読
- ミュート
- RSS フィードを購読する
- ハイライト
- 印刷
- 不適切なコンテンツを報告
Hi @Eletronicc_23,
The address of the device is sent automatically.
In this example, you need TRANSFER_SIZE = 2.
The tx_buffer should contain the address of the register and the data to be written to that register.
Please use a logic analyzer ot an oscilloscope to verify the transfer on the bus.
Regards,
Daniel
- 新着としてマーク
- ブックマーク
- 購読
- ミュート
- RSS フィードを購読する
- ハイライト
- 印刷
- 不適切なコンテンツを報告
Ok good, in this case to receive how will be the example?, I understand if I send the register 0X00, it will send me back the state of the input to see how is the configuration of the Port depending the pin that I want to read. it is something like this:
#define RECEIVE_SIZE (2u)
uint8_t masterTxBuffer[TRANSFER_SIZE]={0x00};
uint8_t masterRxBuffer[TRANSFER_SIZE];
LPI2C_DRV_MasterSendDataBlocking(INST_LPI2C1, masterTxBuffer,RECEIVE_SIZE, true, OSIF_WAIT_FOREVER);
LPI2C_DRV_MasterReceiveDataBlocking(INST_LPI2C1, masterRxBuffer,RECEIVE_SIZE, true, OSIF_WAIT_FOREVER);
- 新着としてマーク
- ブックマーク
- 購読
- ミュート
- RSS フィードを購読する
- ハイライト
- 印刷
- 不適切なコンテンツを報告
The SendDataBlocking should not send the STOP condition in this case.
RECEIVE_SIZE should be 1 if you read just one register, but this depends on the Slave device, please refer to the datasheet of the device.
Regadrs,
Daniel
- 新着としてマーク
- ブックマーク
- 購読
- ミュート
- RSS フィードを購読する
- ハイライト
- 印刷
- 不適切なコンテンツを報告
ok in this case I want to read the input of PORT0 that is the register 0x00, so it will be like this my friend if I am not wrong:
#define RECEIVE_SIZE (1u)
uint8_t masterTxBuffer[ RECEIVE_SIZE]={0x00};
uint8_t masterRxBuffer[ RECEIVE_SIZE];
LPI2C_DRV_MasterSendDataBlocking(INST_LPI2C1, masterTxBuffer,RECEIVE_SIZE, false, OSIF_WAIT_FOREVER);
LPI2C_DRV_MasterReceiveDataBlocking(INST_LPI2C1, masterRxBuffer,RECEIVE_SIZE, true, OSIF_WAIT_FOREVER);
Best Regards
- 新着としてマーク
- ブックマーク
- 購読
- ミュート
- RSS フィードを購読する
- ハイライト
- 印刷
- 不適切なコンテンツを報告
HI @Eletronicc_23,
The KTS1622 datasheet specifies the format.
https://www.kinet-ic.com/uploads/KTS1622-04d.pdf
For example:

If you decide to use the blocking method, it should be something like this:
LPI2C_DRV_MasterSendDataBlocking(uint32_t instance, const uint8_t * txBuff, uint32_t txSize, bool sendStop, uint32_t timeout);
where txSize = 1 and sendStop = 0.
followed by
LPI2C_DRV_MasterReceiveDataBlocking(uint32_t instance, uint8_t * rxBuff, uint32_t rxSize, bool sendStop, uint32_t timeout);
where rxSize = 1 and sendStop = 1.
If you use the non-blocking method, you need to use this function to get the status of the transfer.
LPI2C_DRV_MasterGetTransferStatus(uint32_t instance, uint32_t *bytesRemaining);
Regards,
Daniel
- 新着としてマーク
- ブックマーク
- 購読
- ミュート
- RSS フィードを購読する
- ハイライト
- 印刷
- 不適切なコンテンツを報告
ok for example if I want to write in int the register 0x06 to configurate all the pins of the port0 as input or output, how it will be using the function LPI2C_DRV_MasterSendDataBlocking(uint32_t instance, const uint8_t * txBuff, uint32_t txSize, bool sendStop, uint32_t timeout)?
It will something like this, because I am not sure to send the information to the device
/* Definition of the data transfer size */
#define TRANSFER_SIZE (3u)
uint8_t buffer3[TRANSFER_SIZE]={0x05,0xFF};
LPI2C_DRV_MasterSendDataBlocking(INST_LPI2C1,buffer3,TRANSFER_SIZE, true, OSIF_WAIT_FOREVER);
Please let me know friends
Best Regards,
Rony Vargas
{kind=link}