
- Forums
- Product Forums
- General Purpose MicrocontrollersGeneral Purpose Microcontrollers
- i.MX Forumsi.MX Forums
- QorIQ Processing PlatformsQorIQ Processing Platforms
- Identification and SecurityIdentification and Security
- Power ManagementPower Management
- Wireless ConnectivityWireless Connectivity
- RFID / NFCRFID / NFC
- Advanced AnalogAdvanced Analog
- Neural Processing UnitsNeural Processing Units
- MCX Microcontrollers
- S32G
- S32K
- S32V
- MPC5xxx
- Other NXP Products
- S12 / MagniV Microcontrollers
- Powertrain and Electrification Analog Drivers
- Sensors
- Vybrid Processors
- Digital Signal Controllers
- 8-bit Microcontrollers
- ColdFire/68K Microcontrollers and Processors
- PowerQUICC Processors
- OSBDM and TBDML
- S32M
- S32Z/E
-
- Solution Forums
- Software Forums
- MCUXpresso Software and ToolsMCUXpresso Software and Tools
- CodeWarriorCodeWarrior
- MQX Software SolutionsMQX Software Solutions
- Model-Based Design Toolbox (MBDT)Model-Based Design Toolbox (MBDT)
- FreeMASTER
- eIQ Machine Learning Software
- Embedded Software and Tools Clinic
- S32 SDK
- S32 Design Studio
- GUI Guider
- Zephyr Project
- Voice Technology
- Application Software Packs
- Secure Provisioning SDK (SPSDK)
- Processor Expert Software
- Generative AI & LLMs
-
- Topics
- Mobile Robotics - Drones and RoversMobile Robotics - Drones and Rovers
- NXP Training ContentNXP Training Content
- University ProgramsUniversity Programs
- Rapid IoT
- NXP Designs
- SafeAssure-Community
- OSS Security & Maintenance
- Using Our Community
-
- Cloud Lab Forums
-
- Knowledge Bases
- ARM Microcontrollers
- i.MX Processors
- Identification and Security
- Model-Based Design Toolbox (MBDT)
- QorIQ Processing Platforms
- S32 Automotive Processing Platform
- Wireless Connectivity
- CodeWarrior
- MCUXpresso Suite of Software and Tools
- MQX Software Solutions
- RFID / NFC
- Advanced Analog
- Neural Processing Units
-
- NXP Tech Blogs
- Home
- :
- General Purpose Microcontrollers
- :
- Kinetis Motor Suite
- :
- KMS does not detect motor parameters
KMS does not detect motor parameters
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
KMS does not detect motor parameters
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
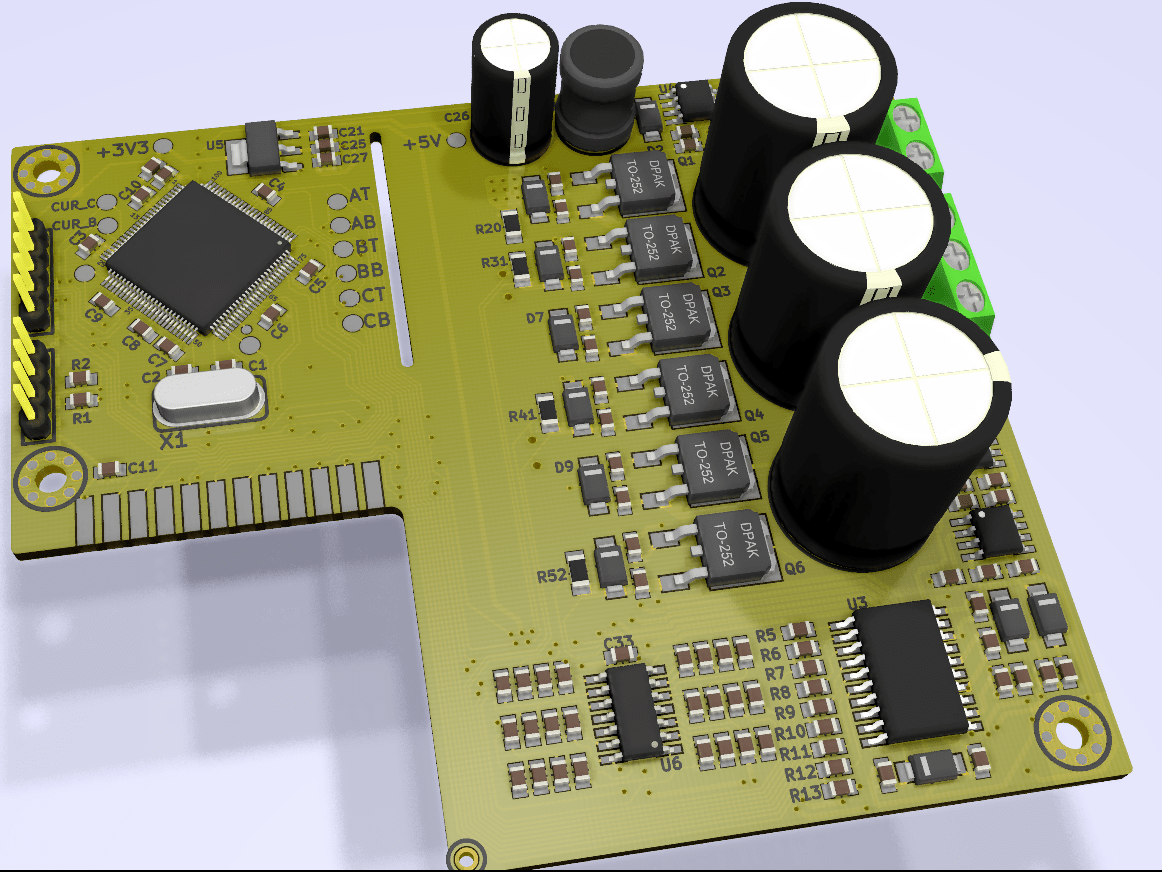
I am using a custom board to interface FRDM-MC-LVMTR (LINIX 45ZWN24-40). Attached are the schematic of this board and PCB view.
KMS GUI detects parameters as below:

Lowering identification currents increase the stator resistance up to 10 ohms.. So, I went over to Advanced Tuning, Manual Motor Setup and copied the values I saw from online training videos which use the same motor:

After that, I've tested open-loop control by setting the "startup speed threshold" to a very high value such as 5000. Then, I ran the motor to a target speed using "Run & Stop Motor" in "Speed Control" menu. It seems to be working fine until about 3000 rpm. After 3000rpm, the motor stops turning very sharply. However, inside, it vibrates like it is turning at about 3000 rpm and sounds like that, too. When I command down to about 1000 rpm, it starts turning again after it slows down.
I've also tested Torque control after setting the "startup speed threshold" to 400 rpm. Regardless of the "Q-Axis Reference" value, it reports the motor speed at about 2600 rpm. I try to disturb the motor with my hand and it seems like it is doing some torque control. However, there seems to be an issue. If I measure the main supply current with a multimeter, and set the "Q-Axis Reference" to a value, let's say 0.4A, and disturb the motor, it is fine until 0.4A. When I go beyond to a value like 0.6A by forcing the motor harder, the control seems to be lost. When I set "Q-Axis Reference" to 1A, control doesn't get lost at 0.6A, however at about 1.1A..
Closed loop mode works only sometimes with the right bandwidth value and only at about 1750 rpm to 2500 rpm. It is very unstable and I need the motor start up to about 1500 rpm using open-loop.
I have tried multiple bandwidth values under "Speed Loop Tuning" menu, that changes some behaviour, however I don't see a stable control.
How should I troubleshoot this?
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Abdullah,
Have you verified that the phase currents being read are correct?
Also I noticed that you are using different MOSFETs than the FRDM-LV-PMSM board, have you also modified the Rdson & Deadtime to reflect these different power devices?
The app note AN5254 goes over some of these adaptations that need to be done in order to make KMS work on a custom board.
Your board looks pretty good btw!
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Hello Adam,
Thank you for your answer :smileyhappy:
I have tried adjusting the Rdson and deadtime parameters according to my setup. However, that didn't change any behaviour at all.
Do you think LMV324 as current sense amplifier could be the problem?
How do I verify that my phase currents are being read correct? Below, I put phase currents' graph when the motor is turning at 1000 RPM in open-loop mode.


- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
It is possible that your opamps are the problem, they are quite a bit slower than the FAN4852.
I've found it is easier to make sure that the phase currents are reading correctly when doing the resistance identification as this will inject a known amount of current into the motor (80% * sqrt(2) * Rated Current) which should be along the A phase, while B & C phase should be half the value and negative.
The captures you posted have the current not balanced, but I would be interested to see what it looks like during resistance identification.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Hello Adam,
I am very grateful of your answers. Somehow my e-mail notifications were turned off and I was waiting for an answer to come in, cluelessly.
I have changed my opamp to MAX4354ESD+ as I suspected that could be a problem. However everything remained the same.
Here is the graph you have asked about, with the new opamp. Rated current of my motor LINIX 45ZWN24-40 seems to be 2.3A.

Here are phase currents with the new opamp, running in open-loop at 1000 RPM:


- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
No worries. I had hoped I solved the issue :smileyhappy:
I'm concerned about the level of noise on the current feedback signal. If I compare your graph with the one I get for the TWR evaluation kit you can see the huge difference.

Even running open loop the eval hardware is much cleaner.

The algorithms used in KMS can tolerate some amount of noise, but I think your design has too much. I would suggest looking into ways to reduce the noise on the current sense lines.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Hello Adam,
I've changed my OP-AMP to TLV274 and things seem to be much better now. There was a discussion on this site about my design.
Closed loop control is noticeably better now but still not reliable, even with the hand-corrected parameters.
Here are my new graphs, they seem much noise-free. The parameter measurement is still wrong, especially the resistance.

Open loop at 1000 RPM:


- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Oh, I've found the problem. It was the bootstrap capacitors for gate driver IC FAN7388. They were not enough, so I made them 2.2 uF and problem solved. The parameters are measured correctly now.

However, my graphs are not as clean as yours


Here is the pin 18 of the MKV31F512VLL12P measuring phase C current. 14kHz noise filtered, scope and probe is 200 MHz, ground lead is smaller than 1 cm:

{kind=link}
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
I'm glad it is now measuring the correct parameters.
I would suspect that the TWR hardware signals would be cleaner than the FRDM (based) since it uses a more robust amplifier design. Your signals are probably clean enough, and as you get into larger currents your signal to noise will improve.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Hello Adam,
Your graphs are perfectly clear! I was worried about the noise issue, and it bit me. Oops..
That means I need to have a look at my PCB and revise to minimise noise. Thanks a lot for your help!
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
To aid you in your circuit design please take a detailed look at the document I just uploaded to the community on PCB layout design. It should help. Also the Dan Beeker training here
Philip Drake
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Hello Philip,
Thank you very much for this info!