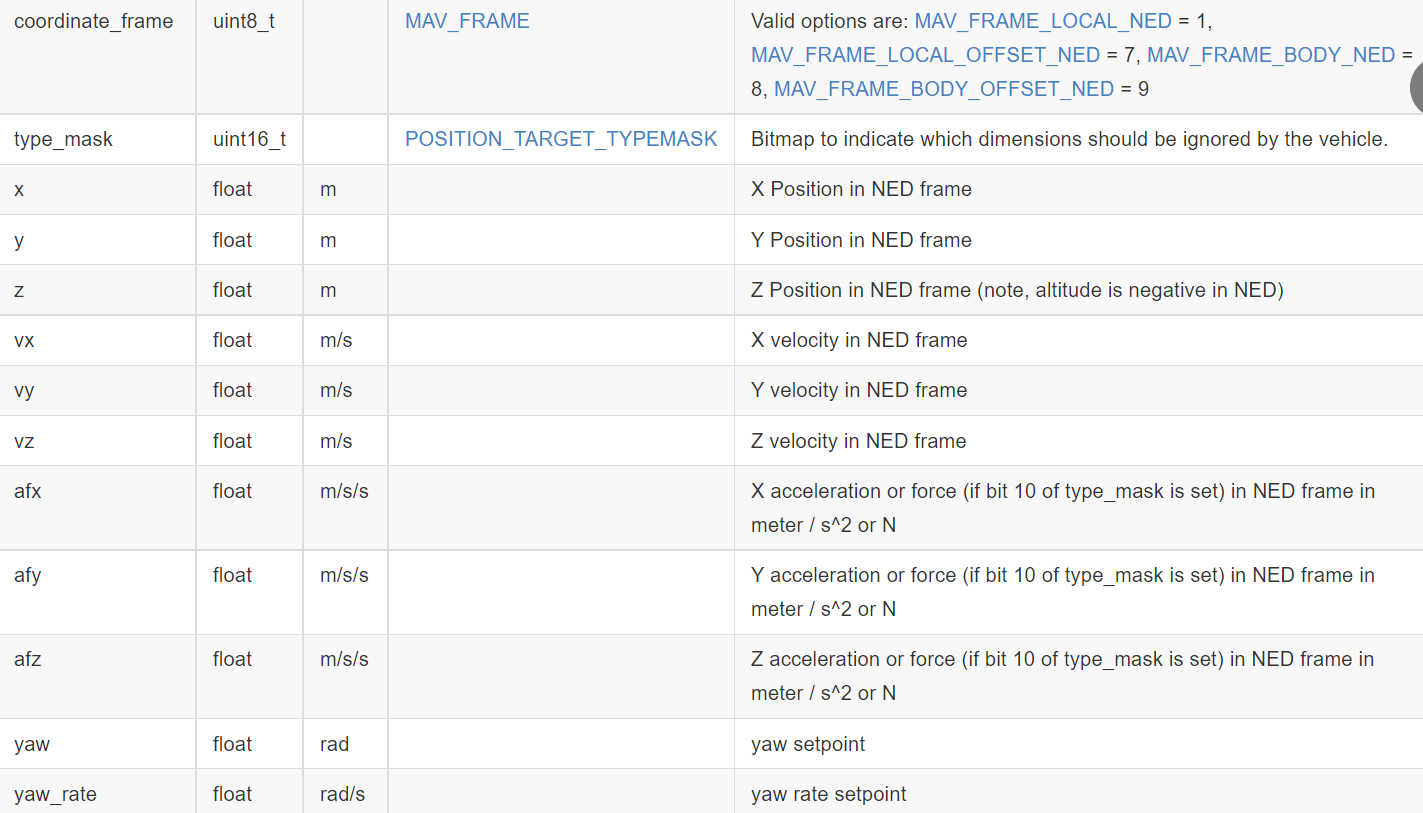
I am working on trying to send commands via the MAVLink Console on the QGroundControl Software to manually control the Hovergames PX4 Quadcopter. I saw a link of various commands for MAVLink, but I am not sure how to write the specified commands in the console. For example, I would like my drone to roll left or right at a rate of 4.5 radians per second, as well as pitching forward front or back at a rate of 4.5 radians per second. This would occur after takeoff at a resting height of around 1.5 meters. An example of the list of commands is attached to an image below. I understand what each variable means, but my coding skills with MAVLink are at a beginner level.

{kind=link}