
- Forums
- Product Forums
- General Purpose MicrocontrollersGeneral Purpose Microcontrollers
- i.MX Forumsi.MX Forums
- QorIQ Processing PlatformsQorIQ Processing Platforms
- Identification and SecurityIdentification and Security
- Power ManagementPower Management
- Wireless ConnectivityWireless Connectivity
- RFID / NFCRFID / NFC
- Advanced AnalogAdvanced Analog
- Neural Processing UnitsNeural Processing Units
- MCX Microcontrollers
- S32G
- S32K
- S32V
- MPC5xxx
- Other NXP Products
- S12 / MagniV Microcontrollers
- Powertrain and Electrification Analog Drivers
- Sensors
- Vybrid Processors
- Digital Signal Controllers
- 8-bit Microcontrollers
- ColdFire/68K Microcontrollers and Processors
- PowerQUICC Processors
- OSBDM and TBDML
- S32M
- S32Z/E
-
- Solution Forums
- Software Forums
- MCUXpresso Software and ToolsMCUXpresso Software and Tools
- CodeWarriorCodeWarrior
- MQX Software SolutionsMQX Software Solutions
- Model-Based Design Toolbox (MBDT)Model-Based Design Toolbox (MBDT)
- FreeMASTER
- eIQ Machine Learning Software
- Embedded Software and Tools Clinic
- S32 SDK
- S32 Design Studio
- GUI Guider
- Zephyr Project
- Voice Technology
- Application Software Packs
- Secure Provisioning SDK (SPSDK)
- Processor Expert Software
- Generative AI & LLMs
-
- Topics
- Mobile Robotics - Drones and RoversMobile Robotics - Drones and Rovers
- NXP Training ContentNXP Training Content
- University ProgramsUniversity Programs
- Rapid IoT
- NXP Designs
- SafeAssure-Community
- OSS Security & Maintenance
- Using Our Community
-
- Cloud Lab Forums
-
- Knowledge Bases
- ARM Microcontrollers
- i.MX Processors
- Identification and Security
- Model-Based Design Toolbox (MBDT)
- QorIQ Processing Platforms
- S32 Automotive Processing Platform
- Wireless Connectivity
- CodeWarrior
- MCUXpresso Suite of Software and Tools
- MQX Software Solutions
- RFID / NFC
- Advanced Analog
- Neural Processing Units
-
- NXP Tech Blogs
- Home
- :
- General Purpose Microcontrollers
- :
- Kinetis Microcontrollers
- :
- CAN BUS interruption not working
CAN BUS interruption not working
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Hello everyone,
CAN bus is not working properly in my project (MK10DX256VLH7 microcontroller).
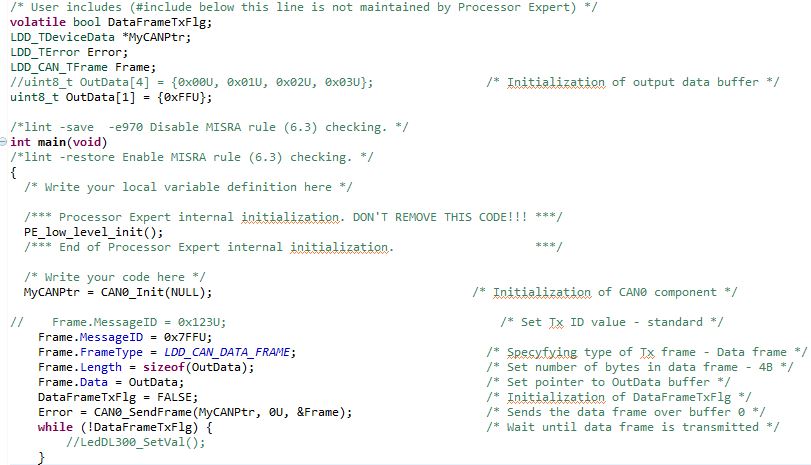
I am using processor expert CAN_LDD component (PE.jpg). I copied and modified the example available on Help on component called Sending data frame with interrupt service (main.jpg).
It sends the data over and over again. It gets stucked in the while loop. It never triggers the interruption (events.jpg).
The can file done by PE seems correct (can.jpg).
I read this thread but I think the solution does not apply to my project.
Could someone give me some advice?
Thanks in advance.
PD: CW 10.6.4
Original Attachment has been moved to: Events.c.zip
Original Attachment has been moved to: CAN0.c.zip
Original Attachment has been moved to: main.c.zip
Solved! Go to Solution.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
No.
That's the big difference between CAN and UART/SPI-type links. With UART and SPI you just 'send your bits into the great blue yonder'. Any proof of 'actual satisfactory delivery' requires firmware efforts at higher layers. In CAN, this 'assurance of satisfactory delivery' is built directly into the CAN peripherals and bit-layer protocol (as well as full multi-master access-arbitration). The CAN TX operation will NOT be 'happy' until SOME node gives the ACK, and NOBODY gives a NAK. Retry is automatic.
That being said, you can of course loop-around and watch the flags to see it sent 'once' and then abort the TX MB.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
This issue comes up a lot around here. Check out my checklist in:
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Hi Earl,
Thanks! I tried the Loop-Back mode (it ignores the ACK) and it triggered the interruption and went on. But no signal was shown at the CAN pins. I don't know if this is normal.
Is there any way, using only the microcontroller (no more nodes), to send only one frame?
Thanks again!
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
No.
That's the big difference between CAN and UART/SPI-type links. With UART and SPI you just 'send your bits into the great blue yonder'. Any proof of 'actual satisfactory delivery' requires firmware efforts at higher layers. In CAN, this 'assurance of satisfactory delivery' is built directly into the CAN peripherals and bit-layer protocol (as well as full multi-master access-arbitration). The CAN TX operation will NOT be 'happy' until SOME node gives the ACK, and NOBODY gives a NAK. Retry is automatic.
That being said, you can of course loop-around and watch the flags to see it sent 'once' and then abort the TX MB.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Understood!
Thanks.