
- Forums
- Product Forums
- General Purpose MicrocontrollersGeneral Purpose Microcontrollers
- i.MX Forumsi.MX Forums
- QorIQ Processing PlatformsQorIQ Processing Platforms
- Identification and SecurityIdentification and Security
- Power ManagementPower Management
- Wireless ConnectivityWireless Connectivity
- RFID / NFCRFID / NFC
- Advanced AnalogAdvanced Analog
- Neural Processing UnitsNeural Processing Units
- MCX Microcontrollers
- S32G
- S32K
- S32V
- MPC5xxx
- Other NXP Products
- S12 / MagniV Microcontrollers
- Powertrain and Electrification Analog Drivers
- Sensors
- Vybrid Processors
- Digital Signal Controllers
- 8-bit Microcontrollers
- ColdFire/68K Microcontrollers and Processors
- PowerQUICC Processors
- OSBDM and TBDML
- S32M
- S32Z/E
-
- Solution Forums
- Software Forums
- MCUXpresso Software and ToolsMCUXpresso Software and Tools
- CodeWarriorCodeWarrior
- MQX Software SolutionsMQX Software Solutions
- Model-Based Design Toolbox (MBDT)Model-Based Design Toolbox (MBDT)
- FreeMASTER
- eIQ Machine Learning Software
- Embedded Software and Tools Clinic
- S32 SDK
- S32 Design Studio
- GUI Guider
- Zephyr Project
- Voice Technology
- Application Software Packs
- Secure Provisioning SDK (SPSDK)
- Processor Expert Software
- Generative AI & LLMs
-
- Topics
- Mobile Robotics - Drones and RoversMobile Robotics - Drones and Rovers
- NXP Training ContentNXP Training Content
- University ProgramsUniversity Programs
- Rapid IoT
- NXP Designs
- SafeAssure-Community
- OSS Security & Maintenance
- Using Our Community
-
- Cloud Lab Forums
-
- Knowledge Bases
- ARM Microcontrollers
- i.MX Processors
- Identification and Security
- Model-Based Design Toolbox (MBDT)
- QorIQ Processing Platforms
- S32 Automotive Processing Platform
- Wireless Connectivity
- CodeWarrior
- MCUXpresso Suite of Software and Tools
- MQX Software Solutions
- RFID / NFC
- Advanced Analog
- Neural Processing Units
-
- NXP Tech Blogs
- Home
- :
- 汎用マイクロコントローラ
- :
- モーター制御とスマートエネルギー
- :
- Re: KEA128BLDCRD Sensor-less BLDC
KEA128BLDCRD Sensor-less BLDC
- RSS フィードを購読する
- トピックを新着としてマーク
- トピックを既読としてマーク
- このトピックを現在のユーザーにフロートします
- ブックマーク
- 購読
- ミュート
- 印刷用ページ
KEA128BLDCRD Sensor-less BLDC
- 新着としてマーク
- ブックマーク
- 購読
- ミュート
- RSS フィードを購読する
- ハイライト
- 印刷
- 不適切なコンテンツを報告
I have the KEA128BLDCRD demo board. No problems getting it up and running with the included motor.
I am trying to drive a custom sensor-less BLDC motor - 3 phase, 10 magnetic poles. I cannot get it to start reliably. Regardless of how I set the various parameters in the Freemaster app, the best I have been able to do is to get it to start one time in 5 or so. If I push-start the motor, it runs fine, but I can't get it through the open-loop start-up process. More often than not, it runs in the opposite direction slowly until a stall error is generated.
(The motor runs fine on a Turnigy PLUSH-80A controller.)
How do I determine the various parameters to get it to start reliably? I have been through the "Sensorless BLDC Control on Kinetis KV" app note (AN5263), the only one I could find with any details on how to tune the system, but the only instructions I find there are in the flow chart:
"Motor starts and smoothly switches to closed loop: False
Sensorless tab:
- Tune Integ thr corr constant
- click update"
I need a little more help than that...
- 新着としてマーク
- ブックマーク
- 購読
- ミュート
- RSS フィードを購読する
- ハイライト
- 印刷
- 不適切なコンテンツを報告
Yes, I have arbitrarily change all the settings, but I really don’t understand what all of them mean or do. I just changed it from 30% to 50%, 75%, 60%, and 45%. I can’t really identify any change in behavior with any of those settings.
After all those changes, I did a “Generate Configuration File” and the resulting BLDC_appconfig.h is attached.
- 新着としてマーク
- ブックマーク
- 購読
- ミュート
- RSS フィードを購読する
- ハイライト
- 印刷
- 不適切なコンテンツを報告
Ok, I think I know where could be a problem. Try to change parameter "pp" in Parameters tab to pp = 5.
This parameter is not number of motor poles but number of pole pairs, means that:
pp = number of poles / 2 = 10 / 2 = 5
Try to change and let me know the result.
- 新着としてマーク
- ブックマーク
- 購読
- ミュート
- RSS フィードを購読する
- ハイライト
- 印刷
- 不適切なコンテンツを報告
That’s a good point. Unfortunately, I tried 5 pole pairs first, and apparently had most recently tried 10 just to see if there’s a change. (I also tried 2 and 4, for no good reason except to see if the behavior changed.)
I’ve just tried it again – changed pp to 5, hit “Update Target”, and find no detectable change in behavior. It still runs OK if I spin-start the motor, but won’t start on its own.
Just so you’re aware of it, I changed the STALLCHECK_MAX_ERRORS macro from 6 to 100 (then re-compiled and re-flashed the CPU) so that it tries to start the motor much longer before giving up and indicating a “stall”. This macro is in KEA128_appconfig.h.
- 新着としてマーク
- ブックマーク
- 購読
- ミュート
- RSS フィードを購読する
- ハイライト
- 印刷
- 不適切なコンテンツを報告
Sorry for previous response I sent it by mistake. It was just a part of my message to you.
Carlos, could you send me screen shots of your setting in FreeMASTER tool?
1) Paramters tab
2) Control Loop tab
3) Sensorless tab
Thanks!
- 新着としてマーク
- ブックマーク
- 購読
- ミュート
- RSS フィードを購読する
- ハイライト
- 印刷
- 不適切なコンテンツを報告
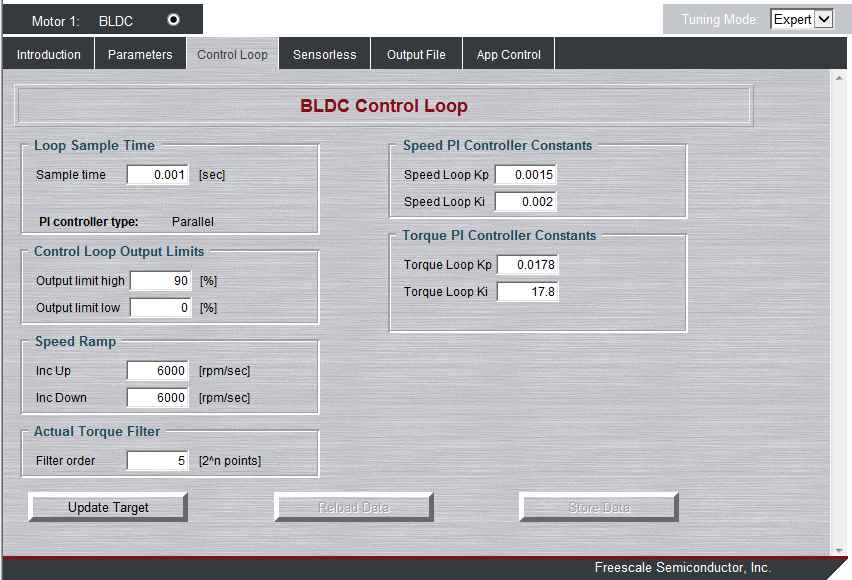{kind=link}
{kind=link}
{kind=link}
- 新着としてマーク
- ブックマーク
- 購読
- ミュート
- RSS フィードを購読する
- ハイライト
- 印刷
- 不適切なコンテンツを報告
And the 0.450 is the stack height of the stator in inches.
- 新着としてマーク
- ブックマーク
- 購読
- ミュート
- RSS フィードを購読する
- ハイライト
- 印刷
- 不適切なコンテンツを報告
Actually, it does have a hand-made label:
9-10/.450/8-22-S.
I'm told these items mean:
9 rotor spokes
10 magnetic poles
8 turns of 22 gauge wire
Star termination
That's pretty much all the information I have about it.
- 新着としてマーク
- ブックマーク
- 購読
- ミュート
- RSS フィードを購読する
- ハイライト
- 印刷
- 不適切なコンテンツを報告
Hi Marek,
Unfortunately, it's a custom made motor, so I don't have any documentation or label information. However, it has 10 poles and runs at 8000 rpm.
Your second question got cut off...
Thanks,
Carlos
- 新着としてマーク
- ブックマーク
- 購読
- ミュート
- RSS フィードを購読する
- ハイライト
- 印刷
- 不適切なコンテンツを報告
Hi Carlos,
Ok so let's have a discussion about this issue.
At first, it would be nice to have more information regarding your BLDC motor. Do you have any kind of motor documentation (label)?
Number of poles ii first important information.
We have already first i,portant information
First important information - number of poles we already have. But to better understand your issue, these parameters are also needed :
1) What is nominal speed
2) What is