
- Forums
- Product Forums
- General Purpose MicrocontrollersGeneral Purpose Microcontrollers
- i.MX Forumsi.MX Forums
- QorIQ Processing PlatformsQorIQ Processing Platforms
- Identification and SecurityIdentification and Security
- Power ManagementPower Management
- MCX Microcontrollers
- S32G
- S32K
- S32V
- MPC5xxx
- Other NXP Products
- Wireless Connectivity
- S12 / MagniV Microcontrollers
- Powertrain and Electrification Analog Drivers
- Sensors
- Vybrid Processors
- Digital Signal Controllers
- 8-bit Microcontrollers
- ColdFire/68K Microcontrollers and Processors
- PowerQUICC Processors
- OSBDM and TBDML
-
- Solution Forums
- Software Forums
- MCUXpresso Software and ToolsMCUXpresso Software and Tools
- CodeWarriorCodeWarrior
- MQX Software SolutionsMQX Software Solutions
- Model-Based Design Toolbox (MBDT)Model-Based Design Toolbox (MBDT)
- FreeMASTER
- eIQ Machine Learning Software
- Embedded Software and Tools Clinic
- S32 SDK
- S32 Design Studio
- GUI Guider
- Zephyr Project
- Voice Technology
- Application Software Packs
- Secure Provisioning SDK (SPSDK)
- Processor Expert Software
- MCUXpresso Training Hub
-
- Topics
- Mobile Robotics - Drones and RoversMobile Robotics - Drones and Rovers
- NXP Training ContentNXP Training Content
- University ProgramsUniversity Programs
- Rapid IoT
- NXP Designs
- SafeAssure-Community
- OSS Security & Maintenance
- Using Our Community
-
- Cloud Lab Forums
-
- Knowledge Bases
- ARM Microcontrollers
- i.MX Processors
- Identification and Security
- Model-Based Design Toolbox (MBDT)
- QorIQ Processing Platforms
-
- Home
- :
- General Purpose Microcontrollers
- :
- Kinetis Microcontrollers
- :
- [FRDM-KL25Z | MCUXpresso | Blocking SPI] SPI transfer only works on the first function call.
[FRDM-KL25Z | MCUXpresso | Blocking SPI] SPI transfer only works on the first function call.
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Hi,
I'm getting started with MCUXpresso (SDK 2) using a KL25Z Freedom board.
I'm trying to use the SPI0 of the microcontroller, i had to control the /SS pin with software configuring it as GPIO to be able to sending multiple bytes while keeping the /SS pin active (logic low).
The problem i have is the transfer only happens once (after i reset the board), after this no transfer is done (see first main function below), to make it "work" i ended up "filling" the spi_transfer_t xfer variable every time after each call of SPI_MasterTransferBlocking function (see second main function below).
Is this the desired behavior? i couldn't find anything about this on the SDK reference manual and the example projects using the Blocking transfers only do the transfer once, so it doesn't show the problem i have.
Any way to have successful transfers without having to fill xfer variable again and again? maybe i'm missing something.
Below is the pin configuration on the pin_mux.c file:
#define SPI_SS_IDX 0
#define SPI_SCLK_IDX 1
#define SPI_MISO_IDX 2
#define SPI_MOSI_IDX 3
// Enable clock on SPI pins
CLOCK_EnableClock(kCLOCK_PortD);
// SS as gpio
gpio_pin_config_t ss;
ss.outputLogic = 1;
ss.pinDirection = kGPIO_DigitalOutput;
PORT_SetPinMux(PORTD, SPI_SS_IDX, kPORT_MuxAsGpio);
GPIO_PinInit(GPIOD, SPI_SS_IDX, &ss);
// SCLK, MOSI and MISO
PORT_SetPinMux(PORTD, SPI_SCLK_IDX, kPORT_MuxAlt2);
PORT_SetPinMux(PORTD, SPI_MOSI_IDX, kPORT_MuxAlt2);
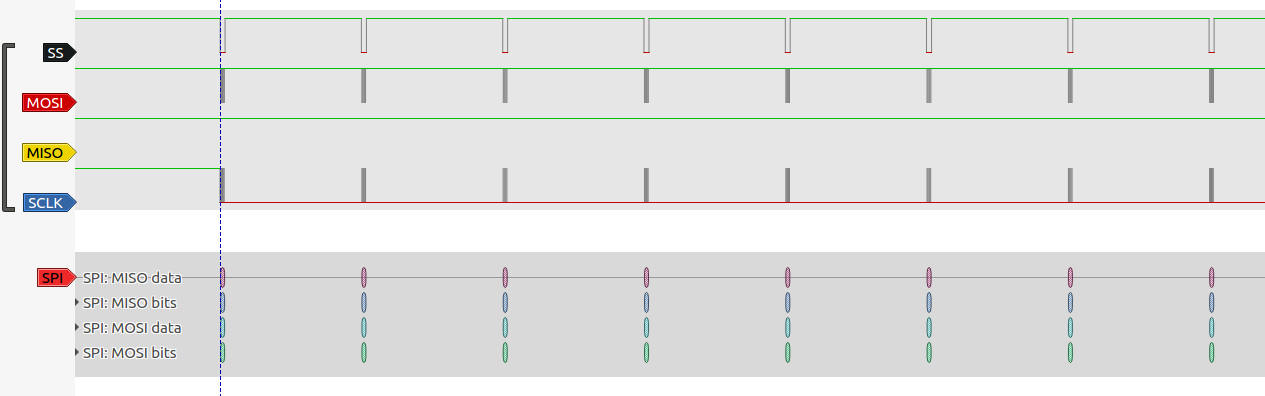
PORT_SetPinMux(PORTD, SPI_MISO_IDX, kPORT_MuxAlt2);With this code the transfer only happens once after reset the board, after the first transfer nothing is transfered (see fail_transfer picture attached).
int main(void)
{
BOARD_InitBootPins();
BOARD_InitBootClocks();
BOARD_InitDebugConsole();
status_t xferStatus = kStatus_Success;
// SPI Master Configuration, using SPI0 instance
spi_master_config_t masterConfig = { 0 };
masterConfig.baudRate_Bps = 5000000U;
masterConfig.direction = kSPI_MsbFirst;
masterConfig.enableMaster = true;
masterConfig.enableStopInWaitMode = false;
masterConfig.outputMode = kSPI_SlaveSelectAsGpio; // configure /SS as GPIO
masterConfig.phase = kSPI_ClockPhaseFirstEdge;
masterConfig.polarity = kSPI_ClockPolarityActiveHigh;
masterConfig.pinMode = kSPI_PinModeNormal;
SPI_MasterInit(SPI0, &masterConfig, CLOCK_GetFreq(kCLOCK_BusClk));
// Transfer configuration
const uint8_t srcArray[5] = { 0xAA, 0xBB, 0xCC, 0xDD, 0xEE };
spi_transfer_t xfer = { 0 };
xfer.txData = srcArray;
xfer.rxData = NULL;
xfer.dataSize = sizeof(srcArray) / sizeof(srcArray[0]);
// xfer.flags; useless for SPI
while(1)
{
GPIO_ClearPinsOutput(GPIOD, 1 << 0); // SS low
xferStatus = SPI_MasterTransferBlocking(SPI0, &xfer);
GPIO_SetPinsOutput(GPIOD, 1 << 0); // SS high
if( kStatus_Success == xferStatus )
{
GPIO_TogglePinsOutput(GPIOB, 1 << 18);
}
for(uint32_t i = 100000; i != 0; i--);
}
}This is the second main function, with it i get transfers every time i call the SPI_MasterTransferBlocking function (see success_transfer picture attached).:
int main(void)
{
BOARD_InitBootPins();
BOARD_InitBootClocks();
BOARD_InitDebugConsole();
// SPI Master test
status_t xferStatus = kStatus_Success;
// SPI Master Configuration
spi_master_config_t masterConfig = { 0 };
masterConfig.baudRate_Bps = 5000000U;
masterConfig.direction = kSPI_MsbFirst;
masterConfig.enableMaster = true;
masterConfig.enableStopInWaitMode = false;
masterConfig.outputMode = kSPI_SlaveSelectAsGpio;
masterConfig.phase = kSPI_ClockPhaseFirstEdge;
masterConfig.polarity = kSPI_ClockPolarityActiveHigh;
masterConfig.pinMode = kSPI_PinModeNormal;
SPI_MasterInit(SPI0, &masterConfig, CLOCK_GetFreq(kCLOCK_BusClk));
// Transfer configuration
spi_transfer_t xfer = { 0 };
const uint8_t srcArray[5] = { 0xAA, 0xBB, 0xCC, 0xDD, 0xEE };
xfer.txData = srcArray;
xfer.rxData = NULL;
xfer.dataSize = sizeof(srcArray) / sizeof(srcArray[0]);
// xfer.flags; useless for SPI
while(1)
{
GPIO_ClearPinsOutput(GPIOD, 1 << 0); // SS low
xferStatus = SPI_MasterTransferBlocking(SPI0, &xfer);
GPIO_SetPinsOutput(GPIOD, 1 << 0); // SS high
if( kStatus_Success == xferStatus )
{
GPIO_TogglePinsOutput(GPIOB, 1 << 18);
}
// Filling xfer again to be able to transfer data on the next SPI_MasterTransferBlocking call
xfer.txData = srcArray;
xfer.rxData = NULL;
xfer.dataSize = sizeof(srcArray) / sizeof(srcArray[0]);
for(uint32_t i = 100000; i != 0; i--);
}
}Thanks in advance.
Carlos
Solved! Go to Solution.
{kind=link}
{kind=link}
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Hi,
In the function SPI_MasterTransferBlocking(SPI_Type *base, spi_transfer_t *xfer) , xfer->txData is changed. So next time you call this function without refill xfer, wrong data(maybe 0) will be sent. That is to say, you pass the address of a variable to a subfunction. Any change to this variable is real.
Regards
Pan Jing
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Hi,
In the function SPI_MasterTransferBlocking(SPI_Type *base, spi_transfer_t *xfer) , xfer->txData is changed. So next time you call this function without refill xfer, wrong data(maybe 0) will be sent. That is to say, you pass the address of a variable to a subfunction. Any change to this variable is real.
Regards
Pan Jing
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Hi,
Thanks for the reply, i didn't saw that xfer->txData was changed on the function. Now everything is clear.
Regards
Carlos