
- Forums
- Product Forums
- General Purpose MicrocontrollersGeneral Purpose Microcontrollers
- i.MX Forumsi.MX Forums
- QorIQ Processing PlatformsQorIQ Processing Platforms
- Identification and SecurityIdentification and Security
- Power ManagementPower Management
- Wireless ConnectivityWireless Connectivity
- RFID / NFCRFID / NFC
- Advanced AnalogAdvanced Analog
- Neural Processing UnitsNeural Processing Units
- MCX Microcontrollers
- S32G
- S32K
- S32V
- MPC5xxx
- Other NXP Products
- S12 / MagniV Microcontrollers
- Powertrain and Electrification Analog Drivers
- Sensors
- Vybrid Processors
- Digital Signal Controllers
- 8-bit Microcontrollers
- ColdFire/68K Microcontrollers and Processors
- PowerQUICC Processors
- OSBDM and TBDML
- S32M
- S32Z/E
-
- Solution Forums
- Software Forums
- MCUXpresso Software and ToolsMCUXpresso Software and Tools
- CodeWarriorCodeWarrior
- MQX Software SolutionsMQX Software Solutions
- Model-Based Design Toolbox (MBDT)Model-Based Design Toolbox (MBDT)
- FreeMASTER
- eIQ Machine Learning Software
- Embedded Software and Tools Clinic
- S32 SDK
- S32 Design Studio
- GUI Guider
- Zephyr Project
- Voice Technology
- Application Software Packs
- Secure Provisioning SDK (SPSDK)
- Processor Expert Software
- Generative AI & LLMs
-
- Topics
- Mobile Robotics - Drones and RoversMobile Robotics - Drones and Rovers
- NXP Training ContentNXP Training Content
- University ProgramsUniversity Programs
- Rapid IoT
- NXP Designs
- SafeAssure-Community
- OSS Security & Maintenance
- Using Our Community
-
- Cloud Lab Forums
-
- Knowledge Bases
- ARM Microcontrollers
- i.MX Processors
- Identification and Security
- Model-Based Design Toolbox (MBDT)
- QorIQ Processing Platforms
- S32 Automotive Processing Platform
- Wireless Connectivity
- CodeWarrior
- MCUXpresso Suite of Software and Tools
- MQX Software Solutions
- RFID / NFC
- Advanced Analog
- Neural Processing Units
-
- NXP Tech Blogs
- Home
- :
- Product Forums
- :
- Sensors
- :
- MMA8652FC Rotation, referencial change
MMA8652FC Rotation, referencial change
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
As of February 2, 2026, the NXP MEMS Sensor products have been transferred to STMicroelectronics. For details on the transferred products, see this page. Please reach out to STMicroelectronics for further information.
MMA8652FC Rotation, referencial change
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Hello everyone,
Don't know if this is the correct location to ask this, to debate this topic.
I have the accelerometer (MMA8652FC) inside my equipment, such that when the equipment is placed in rest in a flat surface I have the G vector forces (0, 0, 1), like I show in the image (Forças_G_EN.png).
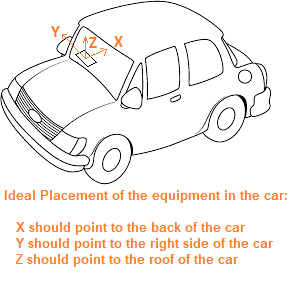
This would be the ideal position to place it inside a car, were would we know the position of the equipment / car.
I mean, we would know that the front of the car was at -X, back was at X, left was at -Y, right was at Y, floor was at -Z and roof was at Z. Image (EquipInCar_02_EN.png)
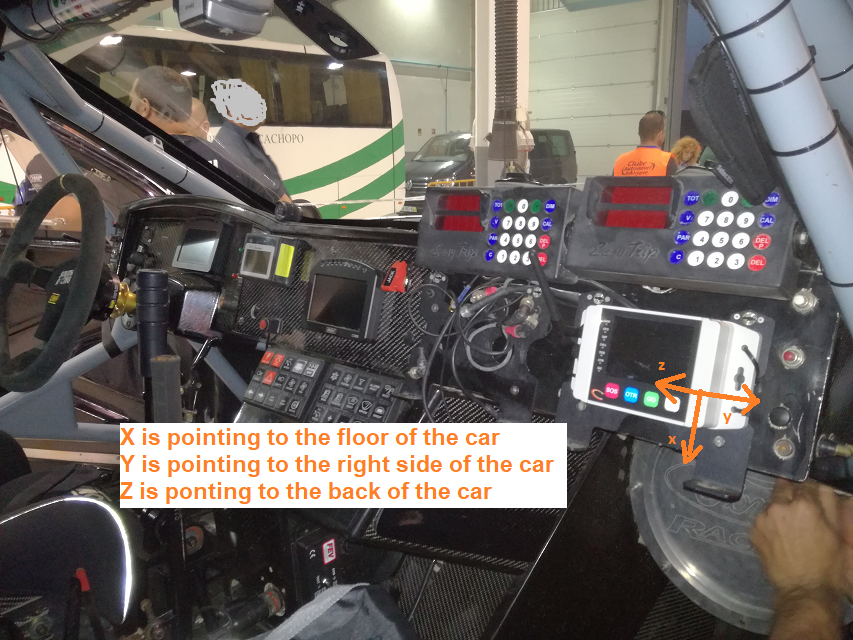
But the equipment is placed inside the car in a frontal position to the co-driver, and it can be in a rotated position.
It doesn't have a fixed position.
I show in image (EquipInCar_01_EN.png) an example of the positioning in a car.
My question is how to convert the values given by the accelerometer from the position in the car (EquipInCar_01_EN.png) to the ideal position (EquipInCar_02_EN.png)?
Anyone can help on this?
Regards,
Sergio
{kind=link}
{kind=link}
{kind=link}