
- NXP Forums
- Product Forums
- General Purpose MicrocontrollersGeneral Purpose Microcontrollers
- i.MX Forumsi.MX Forums
- QorIQ Processing PlatformsQorIQ Processing Platforms
- Identification and SecurityIdentification and Security
- Power ManagementPower Management
- MCX Microcontrollers
- S32G
- S32K
- S32V
- MPC5xxx
- Other NXP Products
- Wireless Connectivity
- S12 / MagniV Microcontrollers
- Powertrain and Electrification Analog Drivers
- Sensors
- Vybrid Processors
- Digital Signal Controllers
- 8-bit Microcontrollers
- ColdFire/68K Microcontrollers and Processors
- PowerQUICC Processors
- OSBDM and TBDML
-
- Solution Forums
- Software Forums
- MCUXpresso Software and ToolsMCUXpresso Software and Tools
- CodeWarriorCodeWarrior
- MQX Software SolutionsMQX Software Solutions
- Model-Based Design Toolbox (MBDT)Model-Based Design Toolbox (MBDT)
- FreeMASTER
- eIQ Machine Learning Software
- Embedded Software and Tools Clinic
- S32 SDK
- S32 Design Studio
- GUI Guider
- Zephyr Project
- Voice Technology
- Application Software Packs
- Secure Provisioning SDK (SPSDK)
- Processor Expert Software
-
- Topics
- Mobile Robotics - Drones and RoversMobile Robotics - Drones and Rovers
- NXP Training ContentNXP Training Content
- University ProgramsUniversity Programs
- Rapid IoT
- NXP Designs
- SafeAssure-Community
- OSS Security & Maintenance
- Using Our Community
-
- Cloud Lab Forums
-
MMA8652FC Rotation, referencial change
Hello everyone,
Don't know if this is the correct location to ask this, to debate this topic.
I have the accelerometer (MMA8652FC) inside my equipment, such that when the equipment is placed in rest in a flat surface I have the G vector forces (0, 0, 1), like I show in the image (Forças_G_EN.png).
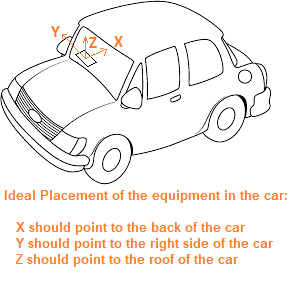
This would be the ideal position to place it inside a car, were would we know the position of the equipment / car.
I mean, we would know that the front of the car was at -X, back was at X, left was at -Y, right was at Y, floor was at -Z and roof was at Z. Image (EquipInCar_02_EN.png)
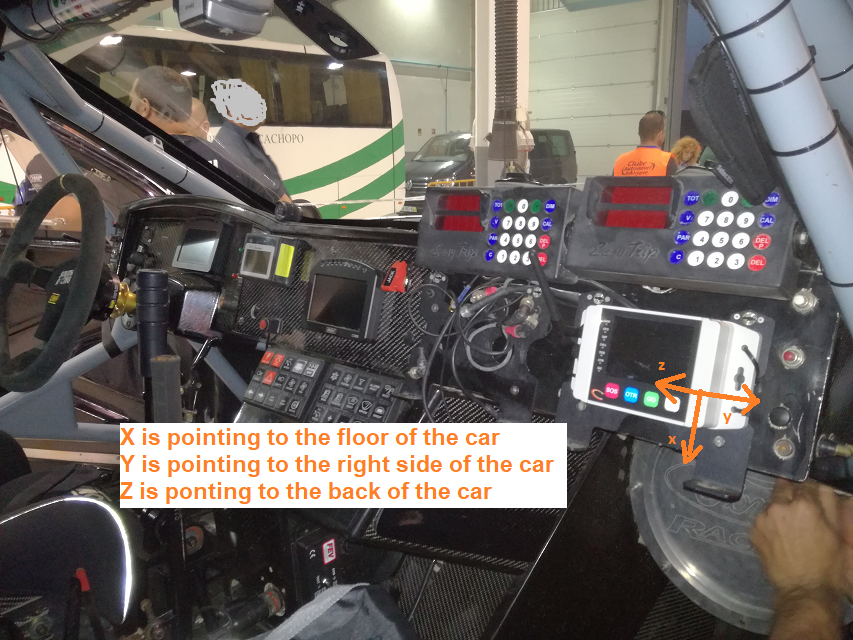
But the equipment is placed inside the car in a frontal position to the co-driver, and it can be in a rotated position.
It doesn't have a fixed position.
I show in image (EquipInCar_01_EN.png) an example of the positioning in a car.
My question is how to convert the values given by the accelerometer from the position in the car (EquipInCar_01_EN.png) to the ideal position (EquipInCar_02_EN.png)?
Anyone can help on this?
Regards,
Sergio
{kind=link}
{kind=link}
{kind=link}