
- Forums
- Product Forums
- General Purpose MicrocontrollersGeneral Purpose Microcontrollers
- i.MX Forumsi.MX Forums
- QorIQ Processing PlatformsQorIQ Processing Platforms
- Identification and SecurityIdentification and Security
- Power ManagementPower Management
- Wireless ConnectivityWireless Connectivity
- RFID / NFCRFID / NFC
- Advanced AnalogAdvanced Analog
- Neural Processing UnitsNeural Processing Units
- MCX Microcontrollers
- S32G
- S32K
- S32V
- MPC5xxx
- Other NXP Products
- S12 / MagniV Microcontrollers
- Powertrain and Electrification Analog Drivers
- Sensors
- Vybrid Processors
- Digital Signal Controllers
- 8-bit Microcontrollers
- ColdFire/68K Microcontrollers and Processors
- PowerQUICC Processors
- OSBDM and TBDML
- S32M
- S32Z/E
-
- Solution Forums
- Software Forums
- MCUXpresso Software and ToolsMCUXpresso Software and Tools
- CodeWarriorCodeWarrior
- MQX Software SolutionsMQX Software Solutions
- Model-Based Design Toolbox (MBDT)Model-Based Design Toolbox (MBDT)
- FreeMASTER
- eIQ Machine Learning Software
- Embedded Software and Tools Clinic
- S32 SDK
- S32 Design Studio
- GUI Guider
- Zephyr Project
- Voice Technology
- Application Software Packs
- Secure Provisioning SDK (SPSDK)
- Processor Expert Software
- Generative AI & LLMs
-
- Topics
- Mobile Robotics - Drones and RoversMobile Robotics - Drones and Rovers
- NXP Training ContentNXP Training Content
- University ProgramsUniversity Programs
- Rapid IoT
- NXP Designs
- SafeAssure-Community
- OSS Security & Maintenance
- Using Our Community
-
- Cloud Lab Forums
-
- Knowledge Bases
- ARM Microcontrollers
- i.MX Processors
- Identification and Security
- Model-Based Design Toolbox (MBDT)
- QorIQ Processing Platforms
- S32 Automotive Processing Platform
- Wireless Connectivity
- CodeWarrior
- MCUXpresso Suite of Software and Tools
- MQX Software Solutions
- RFID / NFC
- Advanced Analog
- Neural Processing Units
-
- NXP Tech Blogs
- Home
- :
- General Purpose Microcontrollers
- :
- Kinetis Microcontrollers
- :
- NXP Solutions to OSD
NXP Solutions to OSD
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
NXP Solutions to OSD
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Dear Javier H,
Please check this application note Connecting Kinetis MCU with CMOS Sensor Interface through GPIO.
Also in the KSDK libraries from the components that have FlexGPIO you can found some examples of USB-Camera.
Please check this Application note and let me know if it helped.
Have a great day
Best regards.
Jonathan
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Hello Jonathan,
Thanks for the reply.
I have read the AN. For test I have on my desktop similar CMOS sensor, OV5647 (raspberry pi camera v1 5Mpx). I already have the cable modified for use with the FRDM-K64F. Are 15 pins, these.
I have connected pins 1,4,7,10 (GND) :: 15 +3V3 :: 13,14 SCL0,SDA0 to the FRDM-K64F.
Now I need to connect pins 2,3,5,6,8,9,11,12
CAM1_DN0 Data lane 0
CAM1_DP0
CAM1_DN1 Data lane 1
CAM1_DP1
CAM1_CN Mipi Clock
CAM1_CP
CAM_GPIO
CAM_CLK
Which pins from FRDM-K64F can I use to connect them?
Best regards
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Hello,
PiCamera (OV5647) is MIPI D-PHY CSI-2.

I found this AN "MIPI–CSI2 Peripheral on i.MX6 MPUs" AN5305 (I'm going to read it).
I am using PiCamera because I had it bought and I did not use it and I thought I can serve for a prototype that I have on my desktop that use the tests with the code of a desktop application written with JavaFX. I'm using it with FRDM-K64F. (I attach an image).

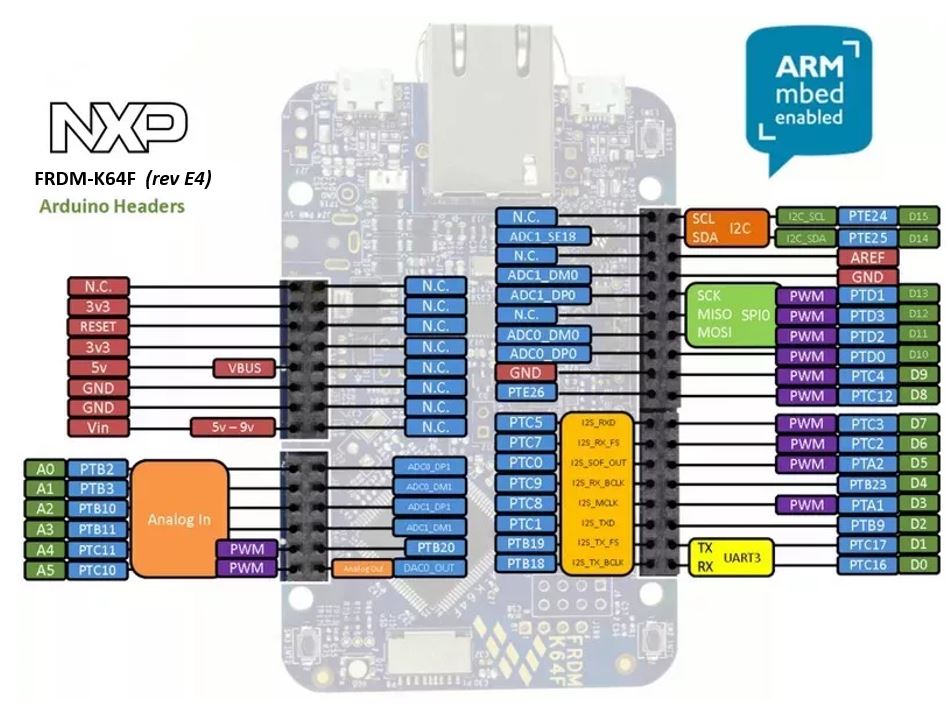{kind=link}
FRDM-K64F :: FRDM-K64F-AGM01 :: BRKT-STBC-AGM01 :: Barometer :: Nano GPS :: Distance sensor :: Buzzer :: 6000mAh Lipo battery :: DC/DC boost converter 3.7V>5V :: XBee Pro 868 long range. Everything works perfectly. I tried it with Mbed. Only I need to connect the camera.
My design is with K26F 169MAPBGA, I have the library and the footprint ready for KiCAD and I'm working on it with other components but I wanted to know alternatives to use video cameras without OSD and add the data (voltage, current, gps coordinates, accelerometer and others) with the K26F microcontroller then transmitted via RF Serial with XBee Pro 868 or other radios for the ISM band 868Mhz, 433Mhz or 900Mhz.
I have seen these days, a little, CMOS and CCD operation. Also the most commonly used CSI-1, CSI-2 and CSI-3 interfaces. Also the physical layers, D-PHY, C-PHY and M-PHY. But the truth I still have not clear which interface to use and if K26F can support them.
I am also confused because on the other hand the majority of cameras that are in the market for FPV work with a single cable for video.
For example this camera has a single cable for video output VID, and +5V and GND to power it. Why only use a cable? What kind of interface do use it?
Is it possible to have a built-in microcontroller and send the video output to a UART TX port?
Best regards
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
In AN4627 say:
NOTE It is significant for the eight GPIO port input pins to be sequential such that GPIO pin n is connected to data line [0] of the camera, and that GPIO pin n+7 is connected to data line [7].
I do not find 8 ports numbered sequentially in the FRDM-K64F (mbed pin names)
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
I'm using mbed bootloader. In mbed I have see ModMAX7456, Is there any alternative in NXP? (For a new design).
Basically what I need is to capture the video from a CMOS/TTL camera from its 4 pins (tx, rx, 3v3, gnd), add text (gps latitude, longitude, altitude, radar distance, rssi and little else) then transmit it through XBee or FatShark transmitter (tx, rx, 3v3, gnd).