
- NXP Forums
- Product Forums
- General Purpose MicrocontrollersGeneral Purpose Microcontrollers
- i.MX Forumsi.MX Forums
- QorIQ Processing PlatformsQorIQ Processing Platforms
- Identification and SecurityIdentification and Security
- Power ManagementPower Management
- MCX Microcontrollers
- S32G
- S32K
- S32V
- MPC5xxx
- Other NXP Products
- Wireless Connectivity
- S12 / MagniV Microcontrollers
- Powertrain and Electrification Analog Drivers
- Sensors
- Vybrid Processors
- Digital Signal Controllers
- 8-bit Microcontrollers
- ColdFire/68K Microcontrollers and Processors
- PowerQUICC Processors
- OSBDM and TBDML
-
- Solution Forums
- Software Forums
- MCUXpresso Software and ToolsMCUXpresso Software and Tools
- CodeWarriorCodeWarrior
- MQX Software SolutionsMQX Software Solutions
- Model-Based Design Toolbox (MBDT)Model-Based Design Toolbox (MBDT)
- FreeMASTER
- eIQ Machine Learning Software
- Embedded Software and Tools Clinic
- S32 SDK
- S32 Design Studio
- Vigiles
- GUI Guider
- Zephyr Project
- Voice Technology
- Application Software Packs
- Secure Provisioning SDK (SPSDK)
- Processor Expert Software
-
- Topics
- Mobile Robotics - Drones and RoversMobile Robotics - Drones and Rovers
- NXP Training ContentNXP Training Content
- University ProgramsUniversity Programs
- Rapid IoT
- NXP Designs
- SafeAssure-Community
- OSS Security & Maintenance
- Using Our Community
-
- Cloud Lab Forums
-
- Home
- :
- MCUXpresso Software and Tools
- :
- Kinetis Design Studio
- :
- How to Maximize FLEXCAN Throughput?
How to Maximize FLEXCAN Throughput?
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
How to Maximize FLEXCAN Throughput?
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Hi everyone,
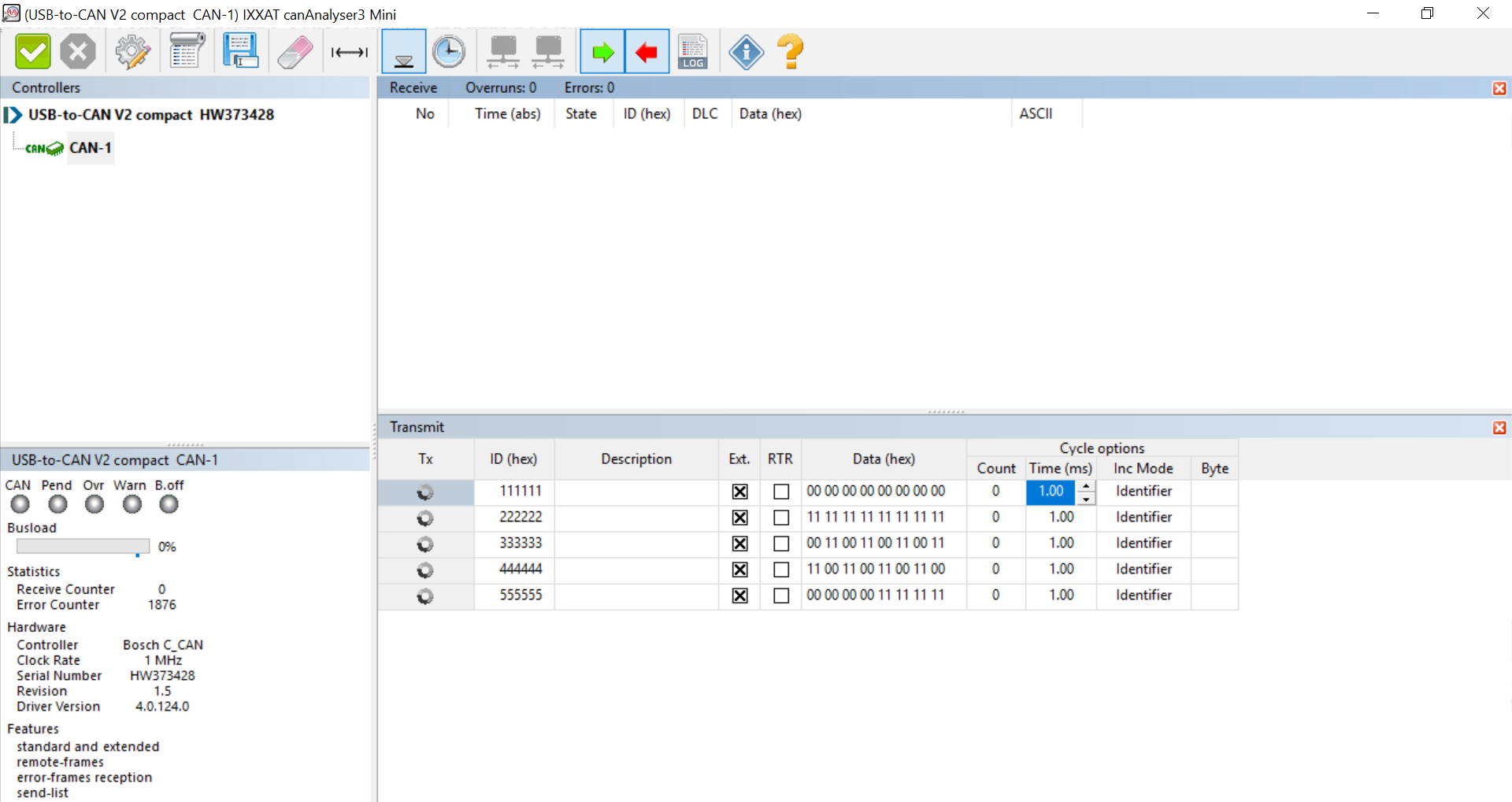
I'm trying to get the K20 series chip's CAN controller to have the highest throughput possible. I've configured my CAN 1 port at 500 kbps and am transmitting an extended (J1939) frame every 1 millisecond using IXXAT's CanAnalyser3 Mini (shown in attachment). When transmitting, CanAnalyser3 Mini shows that the busload is at 26% which should be easy. When I export the incoming frames from the CAN1 TTY port to a file, only 80% of the them are captured compared to how many frames are sent by the CanAnalyser. These frames are received by the CAN transceiver, parsed by the MCU, and then sent to the OS which creates a virtual TTY port in /dev that allows me to echo/cat to.
I know this could be a problem with any of the parts in this communication channel, but I was hoping someone could help me maximize the throughput of the CAN controller on the K20 series MCU chip. I'm new to JTAG debugging and have been using printf statements to go about it, but from what I've read in the Technical Reference Manual, I think I can achieve this by maximizing the RxFIFO setting and the message buffer size (MAX_MB). Maybe there is a way I can enable Loopback mode on the CAN controller to test the throughput? Let me know what more information I can provide.
Thanks,
Brad
{kind=link}
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Dear Brad,
In this link you can find the SDK, this has some examples that can help you to develop your application. I will suggest to check the loopback/loopback_transfer example for what you want to do.
Best Regards,
Alexis Andalon