
- NXP Forums
- Product Forums
- General Purpose MicrocontrollersGeneral Purpose Microcontrollers
- i.MX Forumsi.MX Forums
- QorIQ Processing PlatformsQorIQ Processing Platforms
- Identification and SecurityIdentification and Security
- Power ManagementPower Management
- MCX Microcontrollers
- S32G
- S32K
- S32V
- MPC5xxx
- Other NXP Products
- Wireless Connectivity
- S12 / MagniV Microcontrollers
- Powertrain and Electrification Analog Drivers
- Sensors
- Vybrid Processors
- Digital Signal Controllers
- 8-bit Microcontrollers
- ColdFire/68K Microcontrollers and Processors
- PowerQUICC Processors
- OSBDM and TBDML
-
- Solution Forums
- Software Forums
- MCUXpresso Software and ToolsMCUXpresso Software and Tools
- CodeWarriorCodeWarrior
- MQX Software SolutionsMQX Software Solutions
- Model-Based Design Toolbox (MBDT)Model-Based Design Toolbox (MBDT)
- FreeMASTER
- eIQ Machine Learning Software
- Embedded Software and Tools Clinic
- S32 SDK
- S32 Design Studio
- Vigiles
- GUI Guider
- Zephyr Project
- Voice Technology
- Application Software Packs
- Secure Provisioning SDK (SPSDK)
- Processor Expert Software
-
- Topics
- Mobile Robotics - Drones and RoversMobile Robotics - Drones and Rovers
- NXP Training ContentNXP Training Content
- University ProgramsUniversity Programs
- Rapid IoT
- NXP Designs
- SafeAssure-Community
- OSS Security & Maintenance
- Using Our Community
-
-
- Home
- :
- Product Forums
- :
- Sensors
- :
- accelerometer results while driving a robot
accelerometer results while driving a robot
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
accelerometer results while driving a robot
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Hello,
I've tried to calculate the speed of a robot while in movement, by measuring the acceleration(by using MMA7361LC).
I've tested the accelerometer and it gives good results when moving it (forward, backward) and when checking if it measures the gravity.
Even when it is fixed to the robot(tank), if I'm moving the robot by hand - works well.
The problem is that while driving the robot with it's wheel motors - I'm not able to get reasonable results at all.
From the beginning I'm getting the same oscillations until the robot stops - that I can very barely analyze where there was a positive or negative acceleration, and the noise is very high, even after a 70Hz simple LPF.
I don't understand why when the robot is in movement(by the wheel motors) I don't get something close to a straight line?
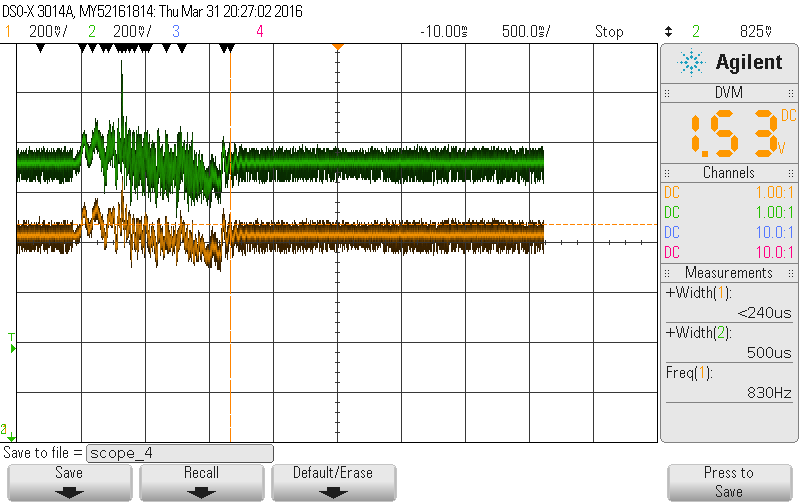
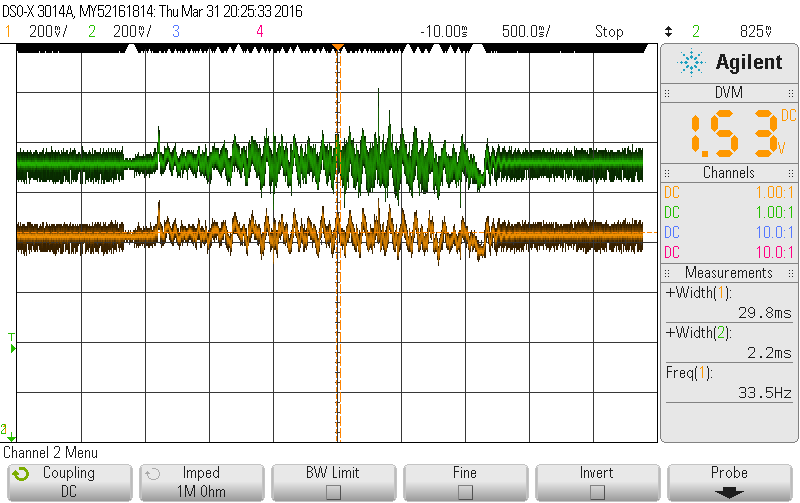
In the attached files:
Green - the positive driving axis, before the LPF.
Orange - the positive driving axis, after the LPF.
scope_3 - a low acceleration(for about 0.5 seconds), a fixed velocity, and then a low negative acceleration(for about 0.5 seconds).
scope_4 - same, with a higher acceleration in the start and in the end.
Please help.
Thanks, Dror.
{kind=link}
{kind=link}
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Hello,
First it is important to mention that MMA7361 is no longer manufactured (obsolete) since Q4 2013 as mentioned in the PCN15634.http://cache.freescale.com/files/shared/doc/pcn/PCN15634.htm
Unfortunately there are no direct replacement for this device, but we do have a new 3-axis low-power Analog-Output Accelerometer Family, the FXLN83xxQ Family, I recommend you to take a look at the FXLN83xxQ datasheet to see if it can work for your application.
Since MMA7361 is no longer manufactured (and Archive) device, documentation/information and support can be limited, but let me try to help you for your question.
What seems to be affecting the accelerometer results it’s the noise caused by the motors when driving the robot, accelerometer is susceptible to the vibrations caused by the motor while moving.
Motors tend to generate a lot of electrical noise that can interfere with other circuits if not isolated properly, giving as result an erratic behaviors. This kind of noise-induced erratic behavior can sometimes be very hard to trace and debug, but a good starting point can be to add a capacitor (1uF can work) right across the motor leads, this would help to reduce the noise, but if it do not work, then you would need to add a more complex filter.
Have a great day,
Jose Reyes
-----------------------------------------------------------------------------------------------------------------------
Note: If this post answers your question, please click the Correct Answer button. Thank you!
-----------------------------------------------------------------------------------------------------------------------