
- NXP Forums
- Product Forums
- General Purpose MicrocontrollersGeneral Purpose Microcontrollers
- i.MX Forumsi.MX Forums
- QorIQ Processing PlatformsQorIQ Processing Platforms
- Identification and SecurityIdentification and Security
- Power ManagementPower Management
- MCX Microcontrollers
- S32G
- S32K
- S32V
- MPC5xxx
- Other NXP Products
- Wireless Connectivity
- S12 / MagniV Microcontrollers
- Powertrain and Electrification Analog Drivers
- Sensors
- Vybrid Processors
- Digital Signal Controllers
- 8-bit Microcontrollers
- ColdFire/68K Microcontrollers and Processors
- PowerQUICC Processors
- OSBDM and TBDML
-
- Solution Forums
- Software Forums
- MCUXpresso Software and ToolsMCUXpresso Software and Tools
- CodeWarriorCodeWarrior
- MQX Software SolutionsMQX Software Solutions
- Model-Based Design Toolbox (MBDT)Model-Based Design Toolbox (MBDT)
- FreeMASTER
- eIQ Machine Learning Software
- Embedded Software and Tools Clinic
- S32 SDK
- S32 Design Studio
- Vigiles
- GUI Guider
- Zephyr Project
- Voice Technology
- Application Software Packs
- Secure Provisioning SDK (SPSDK)
- Processor Expert Software
-
- Topics
- Mobile Robotics - Drones and RoversMobile Robotics - Drones and Rovers
- NXP Training ContentNXP Training Content
- University ProgramsUniversity Programs
- Rapid IoT
- NXP Designs
- SafeAssure-Community
- OSS Security & Maintenance
- Using Our Community
-
-
- Home
- :
- General Purpose Microcontrollers
- :
- Kinetis Microcontrollers
- :
- MK60 SPI master doesn't receive
MK60 SPI master doesn't receive
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
MK60 SPI master doesn't receive
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Hi,
I have a problem with my SPI.
After analysing spi transaction using keil ulink pro debugger and I saw that information sent by SPI slave is not detected.
This is SPI configuration:
void SPI_Init(void) {
/*------------------------------------------------------------------------------
port SPI configuration
*------------------------------------------------------------------------------*/
SIM->SCGC5 |= SIM_SCGC5_PORTD_MASK; /* enable clock for PORTB */
SIM->SCGC3 |= SIM_SCGC3_SPI2_MASK; /* enable clock for SPI2 */
// Assign SPI signals to the port pins
PORTD->PCR[11] &= PORT_PCR_MUX_MASK;
PORTD->PCR[11] |= PORT_PCR_MUX(2) ; // SPI2 CS
PORTD->PCR[12] &= PORT_PCR_MUX_MASK;
PORTD->PCR[12] |= PORT_PCR_MUX(2) ; // SPI2 SCLK
PORTD->PCR[13] &= PORT_PCR_MUX_MASK;
PORTD->PCR[13] |= PORT_PCR_MUX(2) ; // SPI2 MOSI
PORTD->PCR[14] &= PORT_PCR_MUX_MASK;
PORTD->PCR[14] |= PORT_PCR_MUX(2) ; // SPI2 MISO
/*------------------------------------------------------------------------------
SPI register configuration (MCR Register, CTAR Register, SR Register)
*------------------------------------------------------------------------------*/
// Configuration
SPI2->MCR = SPI_MCR_HALT_MASK; // halt SPI before SPI setting psSPI->MCR = SPI_MCR_HALT_MASK
SPI2->MCR &= ~SPI_MCR_MDIS_MASK; // enable module
SPI2->MCR |= SPI_MCR_MSTR_MASK; // master mode enabled
SPI2->MCR |= SPI_MCR_PCSIS(1) // inactive state of CS signal is high
| SPI_MCR_DCONF(0)
| SPI_MCR_DIS_TXF_MASK // disable TX FIFO
| SPI_MCR_DIS_RXF_MASK; // Disable RX FIFO
SPI2->MCR |= SPI_MCR_ROOE_MASK;
// Setting the SPI protocol in order to match requirements of motor driver
SPI2->CTAR[0] = SPI_CTAR_PCSSCK(2) // PCS to SCK Delay Prescaler = 3
| SPI_CTAR_CSSCK(3) // PCS to SCK Delay Scaler = 4
| SPI_CTAR_PBR(1) // Baud Rate Prescaler = 2
| SPI_CTAR_PASC(3) // After SCK Delay Prescaler = 5
| SPI_CTAR_DT(2) // Delay After Transfer Scaler
| SPI_CTAR_BR(4) // Baud Rate Scaler = 512
| SPI_CTAR_ASC(3) // After SCK Delay Scaler
| SPI_CTAR_CPHA_MASK
| SPI_CTAR_PDT(1) // Delay after Transfer Prescaler = 7
| SPI_CTAR_CPOL_MASK // clock polarity - inactive state of SCK is high
| SPI_CTAR_FMSZ(7) ; // 9-bit transfer block
SPI2->SR = SPI_SR_TCF_MASK // clear transfert complet flag
| SPI_SR_EOQF_MASK // clear end of queue flag
| SPI_SR_TFUF_MASK // clear transmit FIFO Fill Flag
| SPI_SR_TFFF_MASK // clear transfert complet flag
| SPI_SR_RFOF_MASK // clear receive FIFO Overflow Flag
|SPI_SR_RFDF_MASK; // clear receive FIFO Drain Flag
SPI2->RSER = (uint32_t)0x00UL; // clear DMA interruptions
SPI2->MCR &= ~SPI_MCR_HALT_MASK; // starts DSPI transfers
}
/*************************************************************************
* Function Name: SPI_Send
* Parameters: sending command
*
* Return: received status data
*
* Description: SPI send data handler uint8_t
*
*************************************************************************/
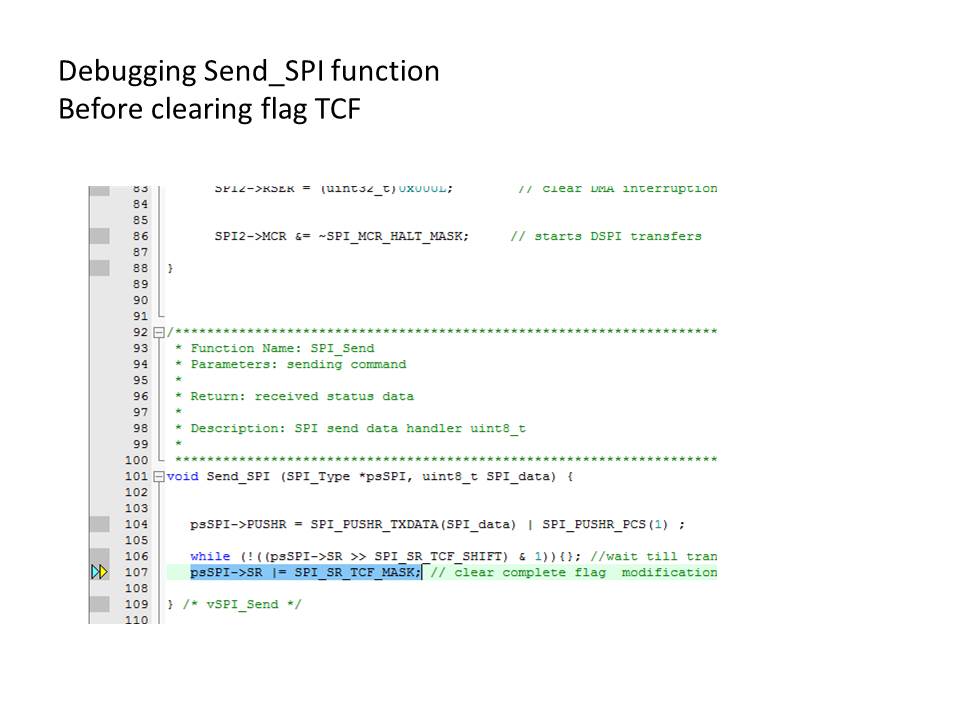
void Send_SPI (SPI_Type *psSPI, uint8_t SPI_data) {
psSPI->PUSHR = SPI_PUSHR_TXDATA(SPI_data) | SPI_PUSHR_PCS(1) ;
while (!((psSPI->SR >> SPI_SR_TCF_SHIFT) & 1)){}; //wait till transmission completes
psSPI->SR |= SPI_SR_TCF_MASK; // clear complete flag
} /* vSPI_Send */
uint8_t Receive_SPI (SPI_Type *psSPI) {
while (!(psSPI->SR & SPI_SR_RFDF_MASK));
return (psSPI->POPR);
} /* uchSPI_Receive */
This is my main.c :
#include "MK60N512MD100.h"
#include "spi.h"
/*----------------------------------------------------------------------------
MAIN function
*----------------------------------------------------------------------------*/
int main (void) {
uint8_t x,y;
SPI_Init();
while(1) {
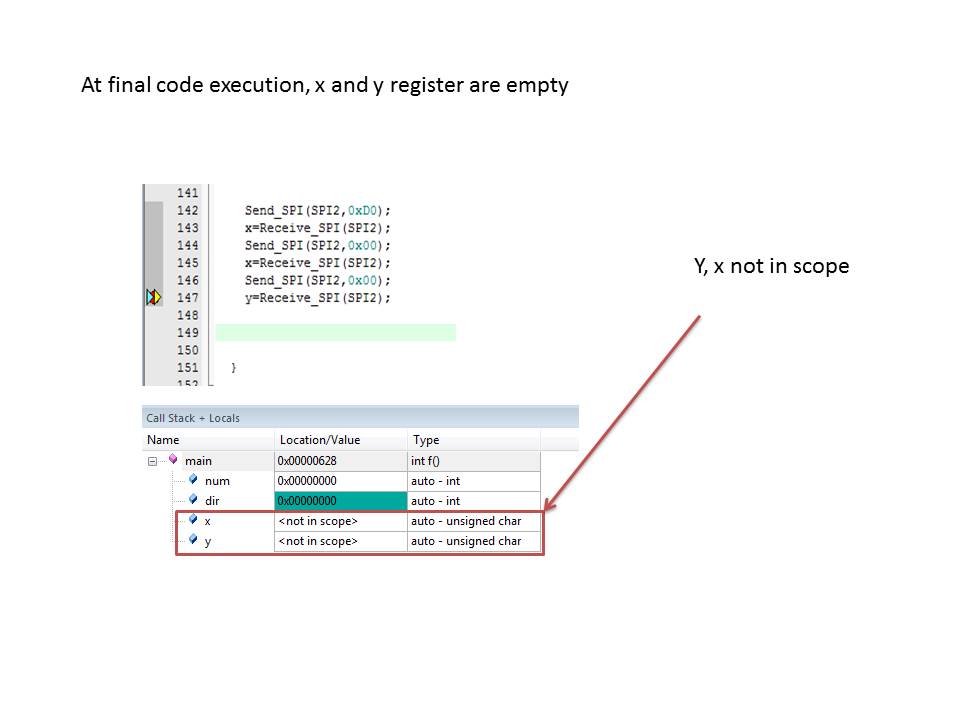
Send_SPI(SPI2,0xD0);
x=Receive_SPI(SPI2);
Send_SPI(SPI2,0x00);
x=Receive_SPI(SPI2);
Send_SPI(SPI2,0x00);
y=Receive_SPI(SPI2);
}
}
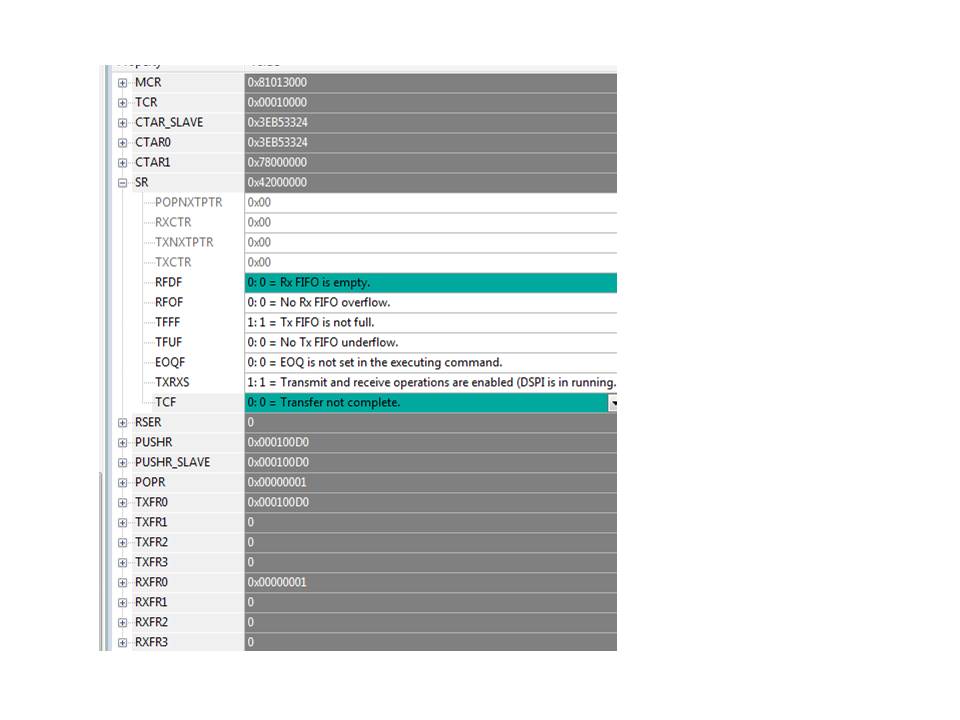
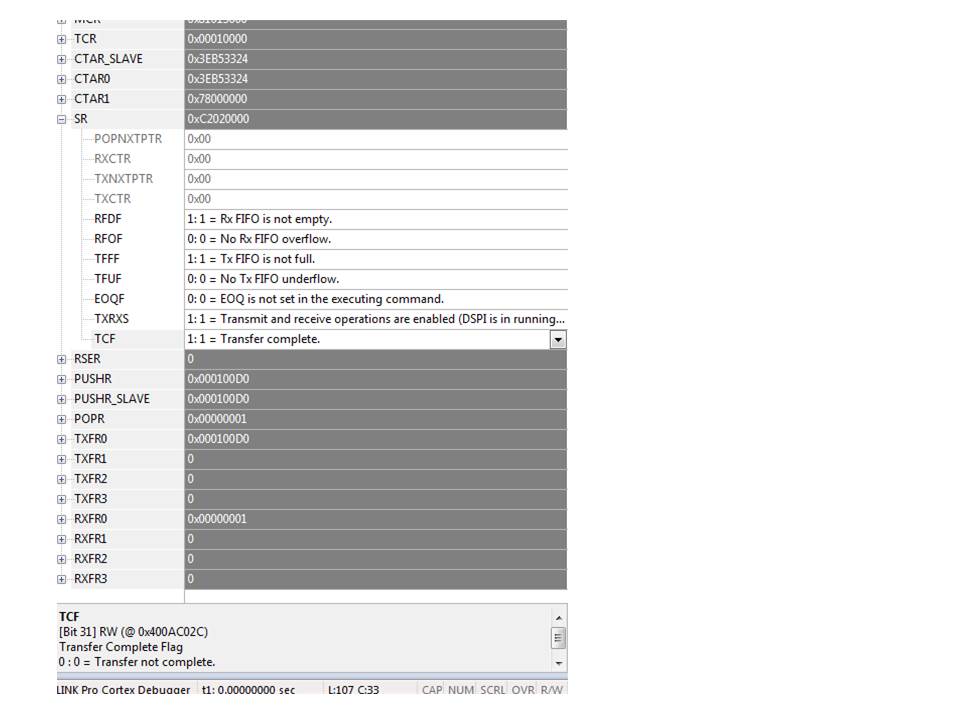
When I see SR register of SPI2, I realize that the flag RFDF is clear when the folloging part is executed:
psSPI->SR |= SPI_SR_TCF_MASK;
Thanks very much
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Thanks
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Hi enna salazar,
I'd like to highly recommend that you should get to understand the communication protocol of the slave device totally through review its datasheet.
I've attached a demo of TWR-K60D100 board about SPI communicate with external flash chips AT26DF081A and I think it help you to establish the connection between the Master and Slave correctly.
Have a great day,
Ping
-----------------------------------------------------------------------------------------------------------------------
Note: If this post answers your question, please click the Correct Answer button. Thank you!
-----------------------------------------------------------------------------------------------------------------------