
- Forums
- Product Forums
- General Purpose MicrocontrollersGeneral Purpose Microcontrollers
- i.MX Forumsi.MX Forums
- QorIQ Processing PlatformsQorIQ Processing Platforms
- Identification and SecurityIdentification and Security
- Power ManagementPower Management
- Wireless ConnectivityWireless Connectivity
- RFID / NFCRFID / NFC
- Advanced AnalogAdvanced Analog
- Neural Processing UnitsNeural Processing Units
- MCX Microcontrollers
- S32G
- S32K
- S32V
- MPC5xxx
- Other NXP Products
- S12 / MagniV Microcontrollers
- Powertrain and Electrification Analog Drivers
- Sensors
- Vybrid Processors
- Digital Signal Controllers
- 8-bit Microcontrollers
- ColdFire/68K Microcontrollers and Processors
- PowerQUICC Processors
- OSBDM and TBDML
- S32M
- S32Z/E
-
- Solution Forums
- Software Forums
- MCUXpresso Software and ToolsMCUXpresso Software and Tools
- CodeWarriorCodeWarrior
- MQX Software SolutionsMQX Software Solutions
- Model-Based Design Toolbox (MBDT)Model-Based Design Toolbox (MBDT)
- FreeMASTER
- eIQ Machine Learning Software
- Embedded Software and Tools Clinic
- S32 SDK
- S32 Design Studio
- GUI Guider
- Zephyr Project
- Voice Technology
- Application Software Packs
- Secure Provisioning SDK (SPSDK)
- Processor Expert Software
- Generative AI & LLMs
-
- Topics
- Mobile Robotics - Drones and RoversMobile Robotics - Drones and Rovers
- NXP Training ContentNXP Training Content
- University ProgramsUniversity Programs
- Rapid IoT
- NXP Designs
- SafeAssure-Community
- OSS Security & Maintenance
- Using Our Community
-
- Cloud Lab Forums
-
- Knowledge Bases
- ARM Microcontrollers
- i.MX Processors
- Identification and Security
- Model-Based Design Toolbox (MBDT)
- QorIQ Processing Platforms
- S32 Automotive Processing Platform
- Wireless Connectivity
- CodeWarrior
- MCUXpresso Suite of Software and Tools
- MQX Software Solutions
- RFID / NFC
- Advanced Analog
- Neural Processing Units
-
- NXP Tech Blogs
- RSS フィードを購読する
- トピックを新着としてマーク
- トピックを既読としてマーク
- このトピックを現在のユーザーにフロートします
- ブックマーク
- 購読
- ミュート
- 印刷用ページ
2026年2月2日をもって、NXPのMEMSセンサー製品はSTMicroelectronicsへ移管されました。移管対象製品の詳細は 本ページをご確認ください。追加情報についてはSTMicroelectronicsまでお問い合わせください。
accelerometer results while driving a robot
- 新着としてマーク
- ブックマーク
- 購読
- ミュート
- RSS フィードを購読する
- ハイライト
- 印刷
- 不適切なコンテンツを報告
Hello,
I've tried to calculate the speed of a robot while in movement, by measuring the acceleration(by using MMA7361LC).
I've tested the accelerometer and it gives good results when moving it (forward, backward) and when checking if it measures the gravity.
Even when it is fixed to the robot(tank), if I'm moving the robot by hand - works well.
The problem is that while driving the robot with it's wheel motors - I'm not able to get reasonable results at all.
From the beginning I'm getting the same oscillations until the robot stops - that I can very barely analyze where there was a positive or negative acceleration, and the noise is very high, even after a 70Hz simple LPF.
I don't understand why when the robot is in movement(by the wheel motors) I don't get something close to a straight line?
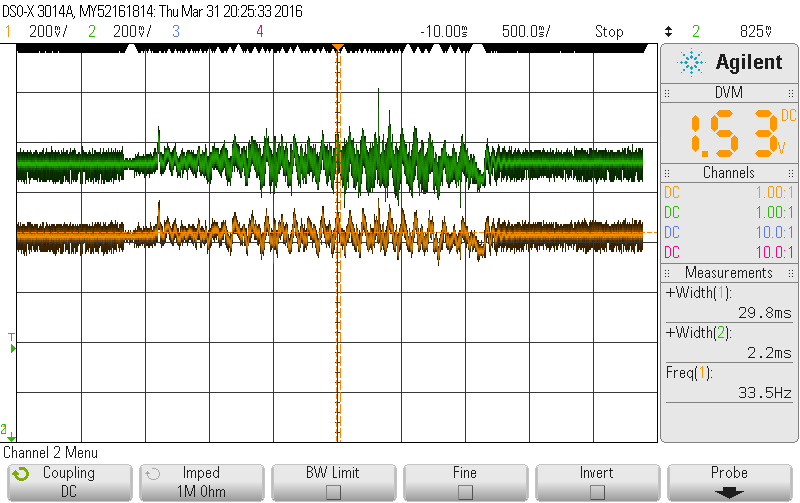
In the attached files:
Green - the positive driving axis, before the LPF.
Orange - the positive driving axis, after the LPF.
scope_3 - a low acceleration(for about 0.5 seconds), a fixed velocity, and then a low negative acceleration(for about 0.5 seconds).
scope_4 - same, with a higher acceleration in the start and in the end.
Please help.
Thanks, Dror.
{kind=link}
{kind=link}
- 新着としてマーク
- ブックマーク
- 購読
- ミュート
- RSS フィードを購読する
- ハイライト
- 印刷
- 不適切なコンテンツを報告
Dror,
I hate to tell you this, but your basic premise is flawed. Trying to get velocity/position by single/double integration is almost always a bad idea.
Problem #1 is that every sensor has noise, and when you integrate noise, you get a random walk over time. See Position Reckoning for more details.
Problem #2 is that one man's signal is another man's noise and vice versa. I'm pretty sure you are seeing vibrations from your robot's motor and gear train.
You would be better off with a rotary encoder for this application to determine speed/distance. Fusion of accel/gyro data can give you your robot's orientation and linear acceleration, but if you need accuracy in velocity and position, you should look at other sensor types.
Mike