
- Forums
- Product Forums
- General Purpose MicrocontrollersGeneral Purpose Microcontrollers
- i.MX Forumsi.MX Forums
- QorIQ Processing PlatformsQorIQ Processing Platforms
- Identification and SecurityIdentification and Security
- Power ManagementPower Management
- Wireless ConnectivityWireless Connectivity
- RFID / NFCRFID / NFC
- Advanced AnalogAdvanced Analog
- Neural Processing UnitsNeural Processing Units
- MCX Microcontrollers
- S32G
- S32K
- S32V
- MPC5xxx
- Other NXP Products
- S12 / MagniV Microcontrollers
- Powertrain and Electrification Analog Drivers
- Sensors
- Vybrid Processors
- Digital Signal Controllers
- 8-bit Microcontrollers
- ColdFire/68K Microcontrollers and Processors
- PowerQUICC Processors
- OSBDM and TBDML
- S32M
- S32Z/E
-
- Solution Forums
- Software Forums
- MCUXpresso Software and ToolsMCUXpresso Software and Tools
- CodeWarriorCodeWarrior
- MQX Software SolutionsMQX Software Solutions
- Model-Based Design Toolbox (MBDT)Model-Based Design Toolbox (MBDT)
- FreeMASTER
- eIQ Machine Learning Software
- Embedded Software and Tools Clinic
- S32 SDK
- S32 Design Studio
- GUI Guider
- Zephyr Project
- Voice Technology
- Application Software Packs
- Secure Provisioning SDK (SPSDK)
- Processor Expert Software
- Generative AI & LLMs
-
- Topics
- Mobile Robotics - Drones and RoversMobile Robotics - Drones and Rovers
- NXP Training ContentNXP Training Content
- University ProgramsUniversity Programs
- Rapid IoT
- NXP Designs
- SafeAssure-Community
- OSS Security & Maintenance
- Using Our Community
-
- Cloud Lab Forums
-
- Knowledge Bases
- ARM Microcontrollers
- i.MX Processors
- Identification and Security
- Model-Based Design Toolbox (MBDT)
- QorIQ Processing Platforms
- S32 Automotive Processing Platform
- Wireless Connectivity
- CodeWarrior
- MCUXpresso Suite of Software and Tools
- MQX Software Solutions
- RFID / NFC
- Advanced Analog
- Neural Processing Units
-
- NXP Tech Blogs
- Home
- :
- General Purpose Microcontrollers
- :
- Kinetis Microcontrollers
- :
- I2C Timing Collisions
I2C Timing Collisions
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
I2C Timing Collisions
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Hi,
I'm running FreeRTOS and I have two independent threads (of the same priority) running I2C communications for two separate I2C buses on a K64 family microcontroller. Each thread polls a device and then sleeps for 1000 ms.
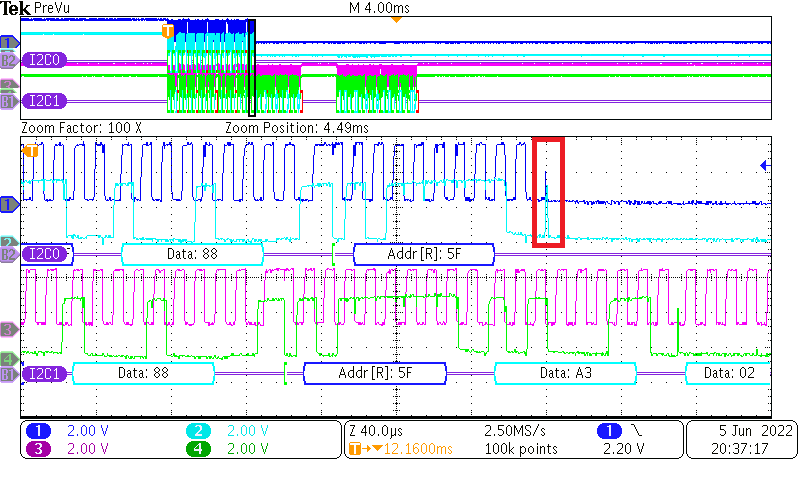
When the two threads are started via the vTaskStartScheduler() call, they run near concurrently, and after a few minutes one of the I2C busses is hung. I grabbed a couple scope captures and show that the clock signal seems to be corrupted. See "communication_failed_1.png" and "communication_failed_2.png"
However I staggered the threads such that one had an initial delay so that the two threads ran near sequentially, and there never was an issue with the communication. See "staggered_thread_start.png".
Has anyone observed something like this? Is there a configuration required to allow communication on two independent I2C busses to run concurrently?
{kind=link}
{kind=link}
{kind=link}
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Hi Erich,
Thanks for the response. I do believe they are strong enough, the I2C lines are pulled up to 3.3V via 2.2k resistors.
I agree, it looks like some cross talk, however I was attributing that to coupling with the scope probes.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
2.2k sounds good (in many cases only 4.7k are used and are usually good too).
I'm wondering if you are doing anything special in your I2C transmit/receive operations (maybe changing the I2C hardware somehow). I would make sure and check if plenty of stack/memory is allocated for each task, just to get a possible memory/stack overflow out of the equation. Just a rough guess.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Hi Erich,
I doubled checked, and each task is only using 25-30% of its allocated stack, so I don't think its a memory/stack overflow.
The I2C buses are configured in the auto generated board.c/peripherals.c files.
As for the transmit receive operations, I'm using the I2C_RTOS_Transfer() API. I set up the transfer structure and then call the API function. The microcontroller is continuously polling various status parameters from the slave devices. I have the following code snippet repeated for the ~20 status parameters, then the task sleeps for 1 second and then polls again.
The communication does work for a few seconds then after a few minutes one of the two buses hangs.
// Make sure bus is not in use
i2cStatus = I2C_MasterGetStatusFlags(busId);
while (kI2C_BusBusyFlag & i2cStatus)
{
i2cStatus = I2C_MasterGetStatusFlags(busId);
}
// Set up Transfer Structure
masterXfer.direction = kI2C_Read;
masterXfer.subaddress = 0x8B;
masterXfer.data = (uint8_t*)&status;
masterXfer.dataSize = 2;
// Initiate Transfer
I2C_RTOS_Transfer(i2cX_RtosHandle, &masterXfer);
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
I think I cannot comment much. Have mostly used a single I2C bus with multiple tasks, and using a mutex to implement the serialization. I have a few applications using two different I2C on Kinetis, accessed each by multiple tasks, and guarded with mutex too, and never faced such a problem.
But I have not used that I2C_RTOS_Transfer() API: I always used a direct API guarded with that above mutex. Not sure if this helps.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
"maybe changing the I2C hardware somehow"
A lot of Freescale/NXP example code uses |= (OR) rather than = (Assignment) for "Write 1 to clear".
At best this wastes space and time, at worse it clears unexpected bits.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Are your pull-ups strong enough? At least some signals show some kind of cross-talk (not sure from the pictures).
I would check if using stronger (external, of course) pull-ups will help.